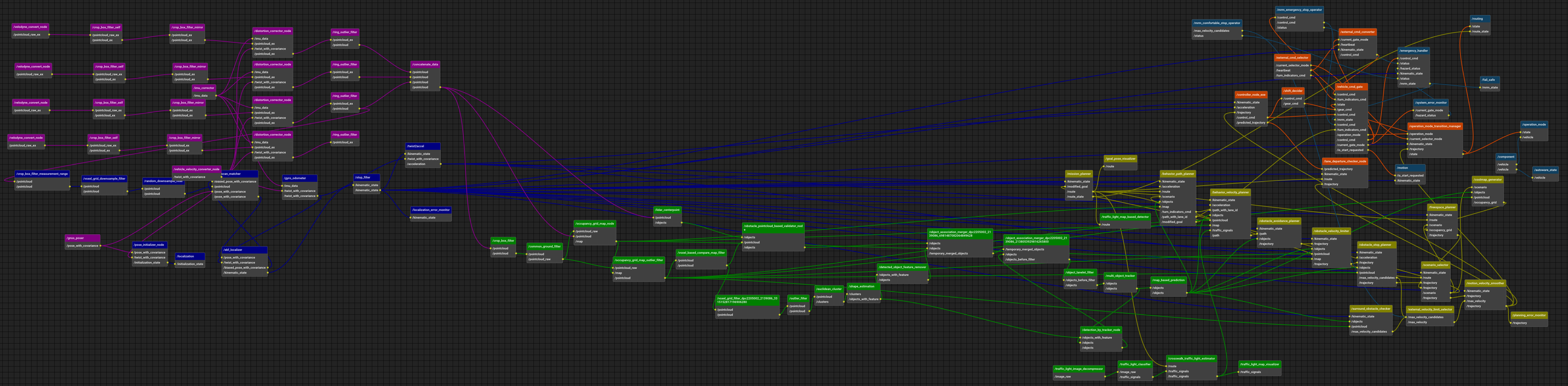
report_autoware_launch_trace_20221227-150253_universe_rosbag
-
Version
- Autoware: https://github.com/autowarefoundation/autoware/tree/2022.12
- Autoware.Universe: https://github.com/autowarefoundation/autoware.universe/tree/0c6c46b33b3c828cb95eaa31fcbf85655fc6a55f
- Scenario: https://autowarefoundation.github.io/autoware-documentation/main/tutorials/ad-hoc-simulation/rosbag-replay-simulation/
-
Environment
- OS: Ubuntu 22.04, 5.15.0-53-generic
- ROS: ROS2 Humble
- CPU: 12th Gen Intel® Core™ i9-12900KF x 24
- GPU: NVIDIA GeForce RTX 3070 Ti, 515.65.01
- Memory: 128GByte (DDR4 3200MHz, Dual-channel)
- Storage: SSD
Path Analysis Report
This report shows message_flow and response_time for each target path.
- component_sensing_0
- component_localization_0
- component_perception_0
- component_planning_0
- component_control_0
- e2e_sensing-to-localization_0
- e2e_sensing-to-control
Node Analysis Report
This report shows detailed information (Frequency, Period and Latency) for callback functions in each package.
Track of Response Time
Callback Latency
List of callback function latency time (Top k)
sensing
localization
perception
planning
control
system
vehicle
| Callback Name | Avg [ms] | Median [ms] | 99%ile [ms] | Max [ms] |
|---|