RadarSensor
Introduction
The RadarSensor component simulates a radar sensor that detect objects in the environment.
Real-world radar sensors work by emitting radio waves and detecting the waves that are reflected back from objects in
the environment.
RadarSensor implements simplified a model of wave propagation and reflection using GPU-accelerated ray casting and
post-processing
to obtain radar-specific information such as radial (aka doppler)
speed, RCS,
power level, noise level and signal-to-noise ratio.
RadarSensor component is a part of RGLUnityPlugin that integrates the external
RobotecGPULidar (RGL) library with Unity.
Use RGL in your scene
If you want to use RGL in your scene, make sure the scene has
an SceneManager component added and all objects meet
the usage requirements.
Prefabs
Prefabs can be found under the following path:
Assets/AWSIM/Prefabs/Sensors/RobotecGPULidars/*
| Radar | Path | Appearance |
|---|---|---|
| SmartmicroDRVEGRD169 | SmartmicroDRVEGRD169.prefab |
 |
Components
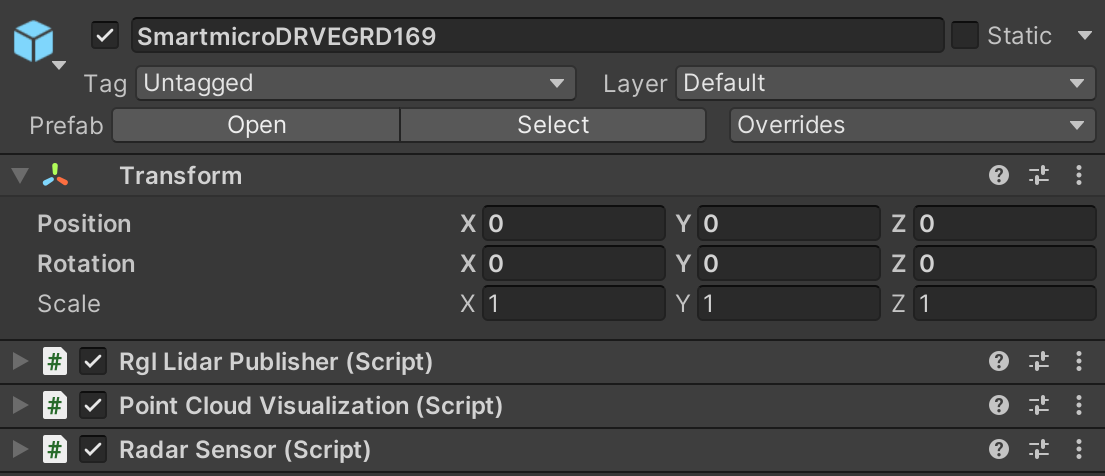
The Radar sensor simulation functionality is split into three components:
- Radar Sensor (script) - provides radar configuration and creates RGL pipeline to simulate radar.
- Rgl Lidar Publisher (script) - extends RGL pipeline with nodes to publish ROS2 messages (see).
- Point Cloud Visualization (script) - visualizes point cloud collected by sensor (see).
Radar Sensor (script)
This is the component that creates the RGL node pipeline for the radar simulation.
The pipeline consists of:
- setting ray pattern,
- transforming rays to represent pose of the sensor on the scene,
- applying noise,
- performing raytracing,
- performs point cloud post-processing to achieve radar-like output
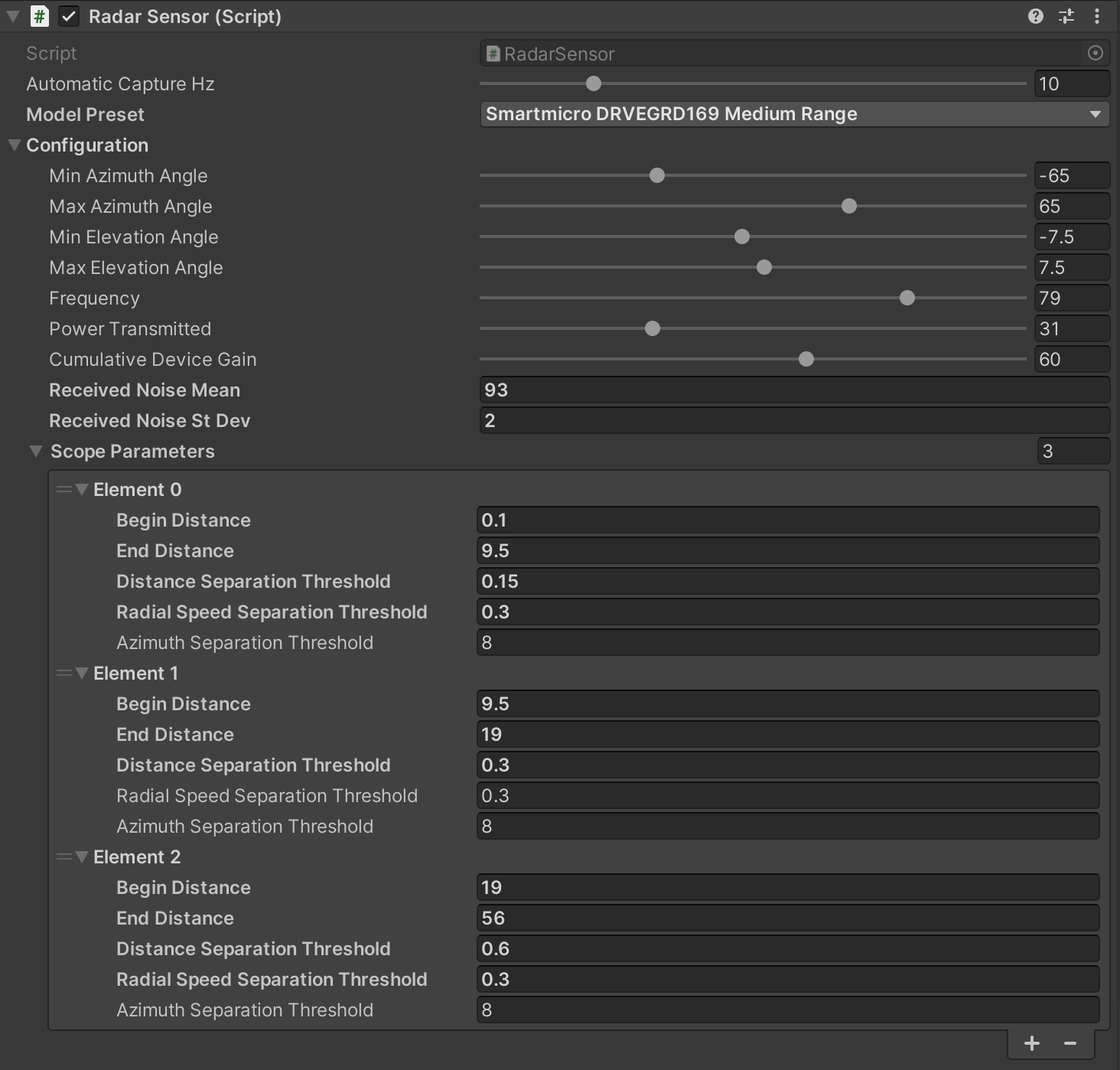
Elements configurable from the editor level
Automatic Capture Hz- the rate of sensor processingModel Preset- allows selecting one of the built-in radar models- Configuration:
Min Azimuth Angle- minimum azimuth angle (in degrees)Max Azimuth Angle- maximum azimuth angle (in degrees)Min Elevation Angle- minimum elevation angle (in degrees)Max Elevation Angle- maximum elevation angle (in degrees)Frequency- frequency of the wave propagation by the radar (in GHz)Power Transmitted- power transmitted by the radar (in dBm)Cumulative Device Gain- gain of the radar's antennas and any other gains of the device (in dBi)Received Noise Mean- mean of the received noise (in dB)Received Noise St Dev- standard deviation of the received noise (in dB)- Scope Parameters - radar ability to separate (distinguish) different detections varies with the distance (e.g. by employing multiple frequency bands). Scope parameters allow to configure separation thresholds for different distance ranges (scopes):
Begin Distance- begin of the distance interval where the following parameters are used (in meters)End Distance- end of the distance interval where the following parameters are used (in meters)Distance Separation Threshold- minimum distance between two points to be considered as separate detections (in meters)Radial Speed Seperation Threshold- minimum radial speed difference between two points to be considered as separate detections (in meters per seconds)Azimuth Separation Threshold- minimum azimuth difference between two points to be considered as separate detections (in degrees)
Output Data
RadarSensor provides public methods to extend this pipeline with additional RGL nodes.
In this way, other components can request point cloud processing operations and receive data in the desired format.
Example of how to get XYZ point cloud data:
- To obtain point cloud data from another component you have to create a new
RGLNodeSequencewith RGL node to yield XYZ field and connect it toRadarSensor:rglOutSubgraph = new RGLNodeSequence().AddNodePointsYield("OUT_XYZ", RGLField.XYZ_F32); radarSensor = GetComponent<RadarSensor>(); radarSensor.ConnectToWorldFrame(rglOutSubgraph); // you can also connect to radar frame using ConnectToRadarFrame // You can add a callback to receive a notification when new data is ready radarSensor.onNewData += HandleRadarDataMethod; - To get data from
RGLNodeSequencecallGetResultData:Vector3[] xyz = new Vector3[0]; rglOutSubgraph.GetResultData<Vector3>(ref xyz);
ROS 2 topic content
RadarSensor uses RglLidarPublisher for publishing two types of ROS 2 messages:
The content of these messages is presented in the table below.
| Message type | Data which the message has | Comment |
|---|---|---|
| PointCloud2 | Position Radial speed Power RCS Noise SNR |
Calculated in Radar node from RGL |
| RadarScan | Range Azimuth Elevation Radial speed Amplitude |
Calculated in Radar node from RGL |
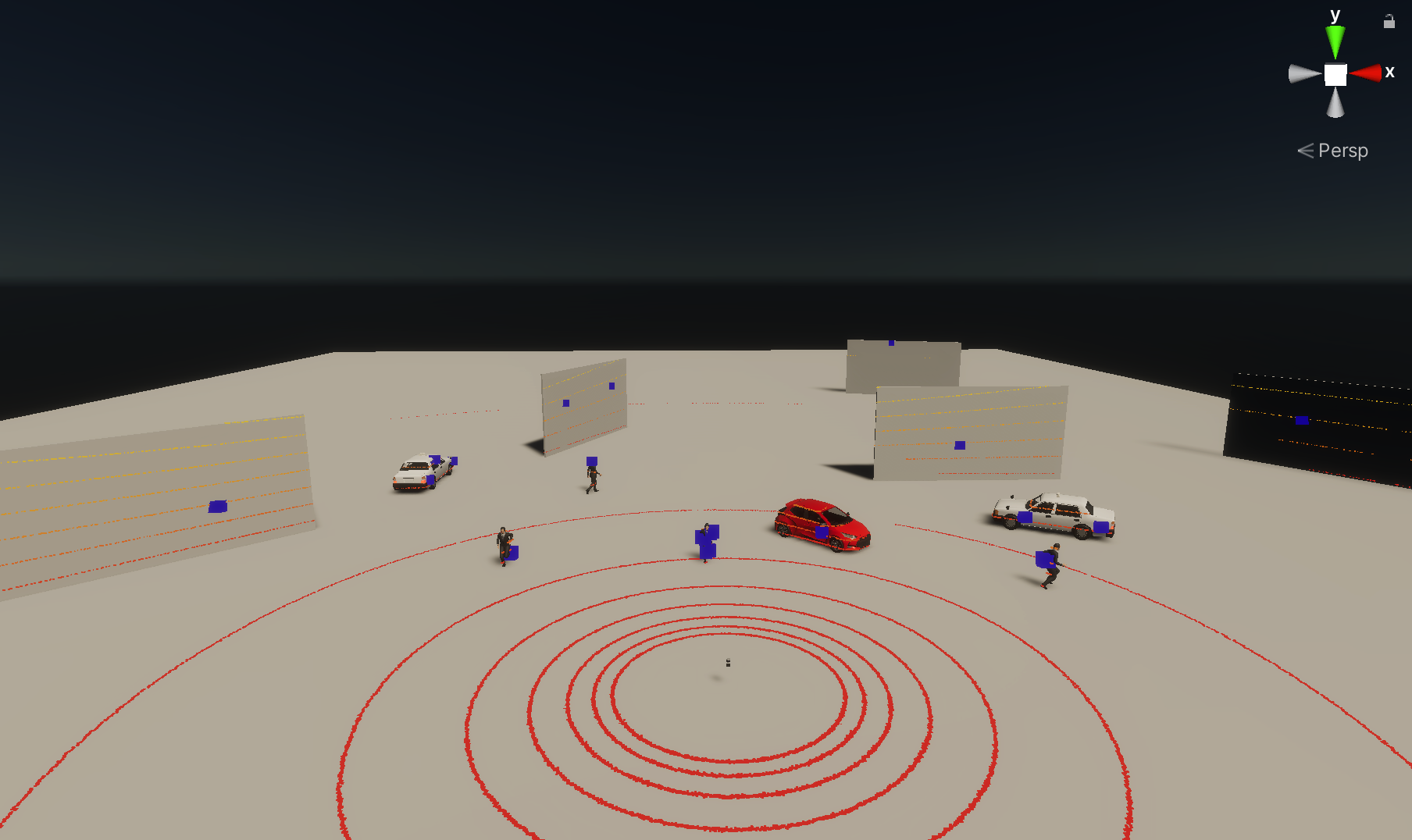
Example
On the screenshot below (scene RadarSceneDevelopSample) radar detections are shown as blue boxes.