AWSIM
AWSIM is an open-source simulator made with Unity for autonomous driving research and development. It is developed for self-driving software like Autoware. This simulator aims to bridge the gap between the virtual and real worlds, enabling users to train and evaluate their autonomous systems in a safe and controlled environment before deploying them on real vehicles. It provides a realistic virtual environment for training, testing, and evaluating various aspects of autonomous driving systems.
AWSIM simulates a variety of real-world scenarios, with accurate physics and sensor models. It offers a wide range of sensors, such as: Cameras, GNSS, IMU and LiDARs, allowing developers to simulate their autonomous vehicle's interactions with the environment accurately. The simulator also models dynamic objects, such as pedestrians, other vehicles, and traffic lights, making it possible to study interactions and decision-making in complex traffic scenarios. This enables the testing and evaluation of perception, planning, and control algorithms under different sensor configurations and scenarios.
AWSIM supports a flexible and modular architecture, making it easy to customize and extend its capabilities. Users can modify the current or add a new environment with their own assets and traffic rules to create custom scenarios to suit their specific research needs. This allows for the development and testing of advanced algorithms in diverse driving conditions.
Because AWSIM was developed mainly to work with Autoware, it supports:
- Ubuntu 22.04 and Windows 10/11
- ROS2 Humble distribution
Prerequisites
You can read more about the prerequisites and running AWSIM here.
Connection with Autoware
Introduction about how the connection between AWSIM and Autoware works can be read here.
Why was AWSIM developed?
The main objectives of AWSIM are to facilitate research and development in autonomous driving, enable benchmarking of algorithms and systems, and foster collaboration and knowledge exchange within the autonomous driving community. By providing a realistic and accessible platform, AWSIM aims to accelerate the progress and innovation in the field of autonomous driving.
Architecture
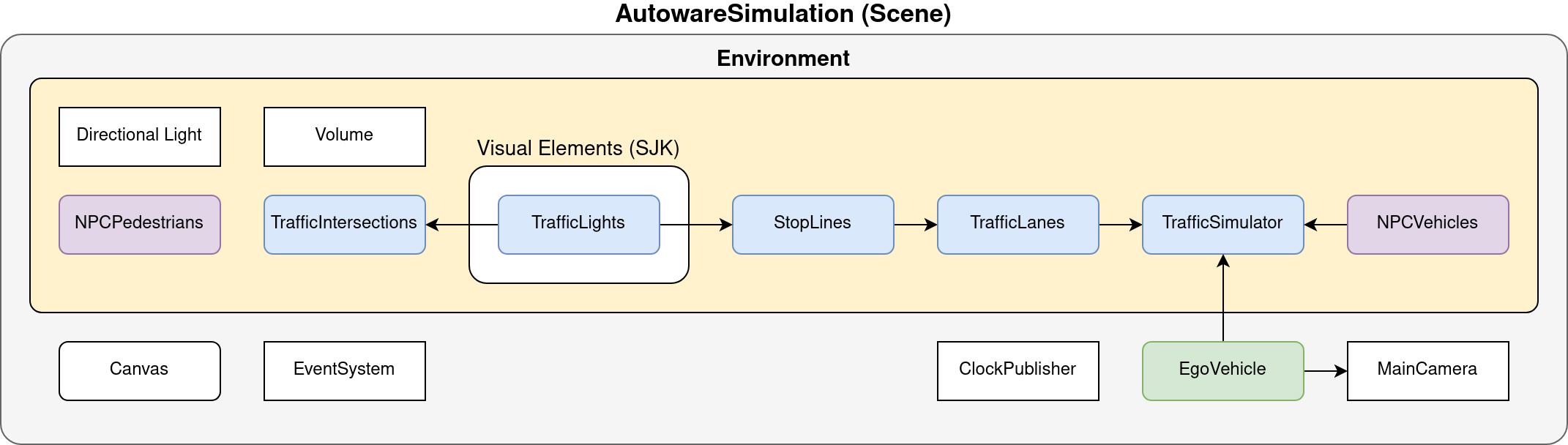
To describe the architecture of AWSIM, first of all, it is necessary to mention the Scene. It contains all the objects occurring in the simulation of a specific scenario and their configurations. The default AWSIM scene that is developed to work with Autoware is called AutowareSimulation.
In the scene we can distinguish basics components such like MainCamera, ClockPublisher, EventSystem and Canvas. A detailed description of the scene and its components can be found here.
Besides the elements mentioned above, the scene contains two more, very important and complex components: Environment and EgoVehicle - described below.
Environment
Environment is a component that contains all Visual Elements that simulate the environment in the scene and those that provide control over them. It also contains two components Directional Light and Volume, which ensure suitable lighting for Visual Elements and simulate weather conditions. A detailed description of these components can be found here.
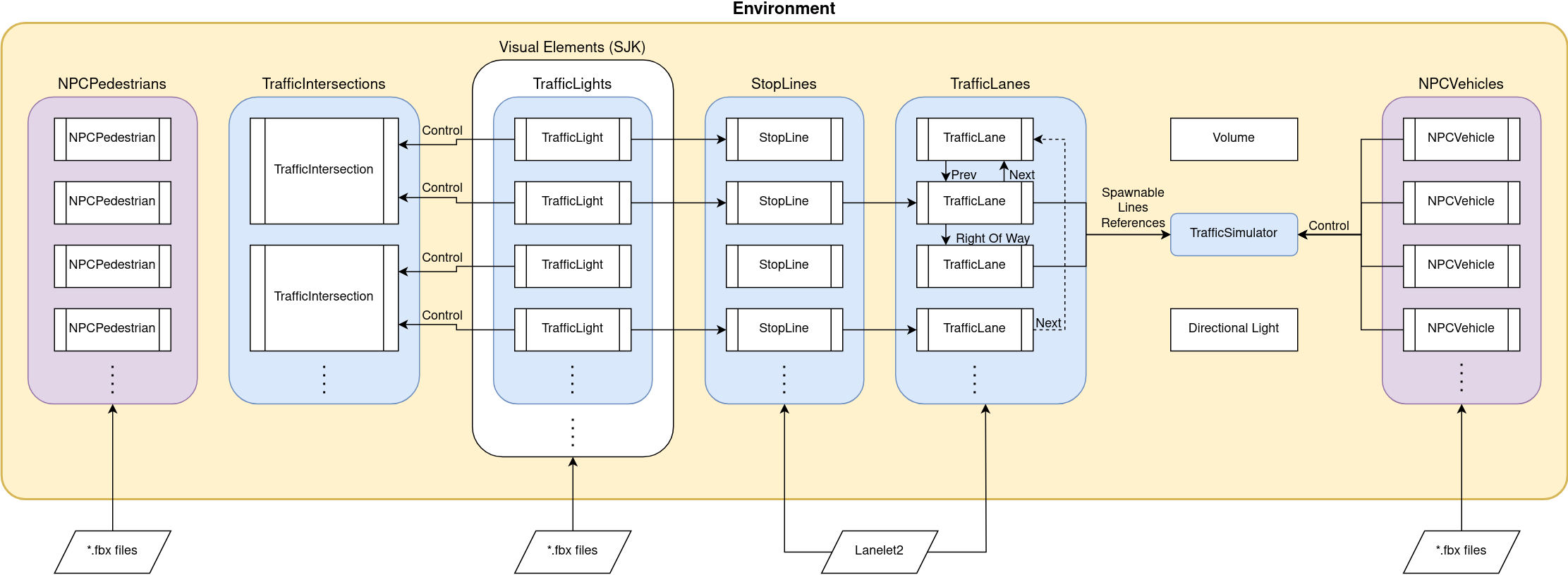
In addition to Visual Elements such as buildings or greenery, it contains the entire architecture responsible for traffic. The traffic involves NPCVehicles that are spawned in the simulation by TrafficSimulator - using traffic components. A quick overview of the traffic components is provided below, however, you can read their detailed description here.
NPCPedestrians are also Environment components, but they are not controlled by TrafficSimulator. They have added scripts that control their movement - you can read more details here.
Traffic Components
TrafficLanes and StopLines are elements loaded into Environment from Lanelet2.
TrafficLanes have defined cross-references in such a way as to create routes along the traffic lanes. In addition, each TrafficLane present at the intersection has specific conditions for yielding priority. TrafficSimulator uses TrafficLanes to spawn NPCVehicles and ensure their movement along these lanes. If some TrafficLanes ends just before the intersection, then it has a reference to StopLine. Each StopLine at the intersection with TrafficLights has reference to the nearest TrafficLight. TrafficLights belong to one of the visual element groups and provide an interface to control visual elements that simulate traffic light sources (bulbs). A single TrafficIntersection is responsible for controlling all TrafficLights at one intersection.
Detailed description of mentioned components is in this section.
EgoVehicle
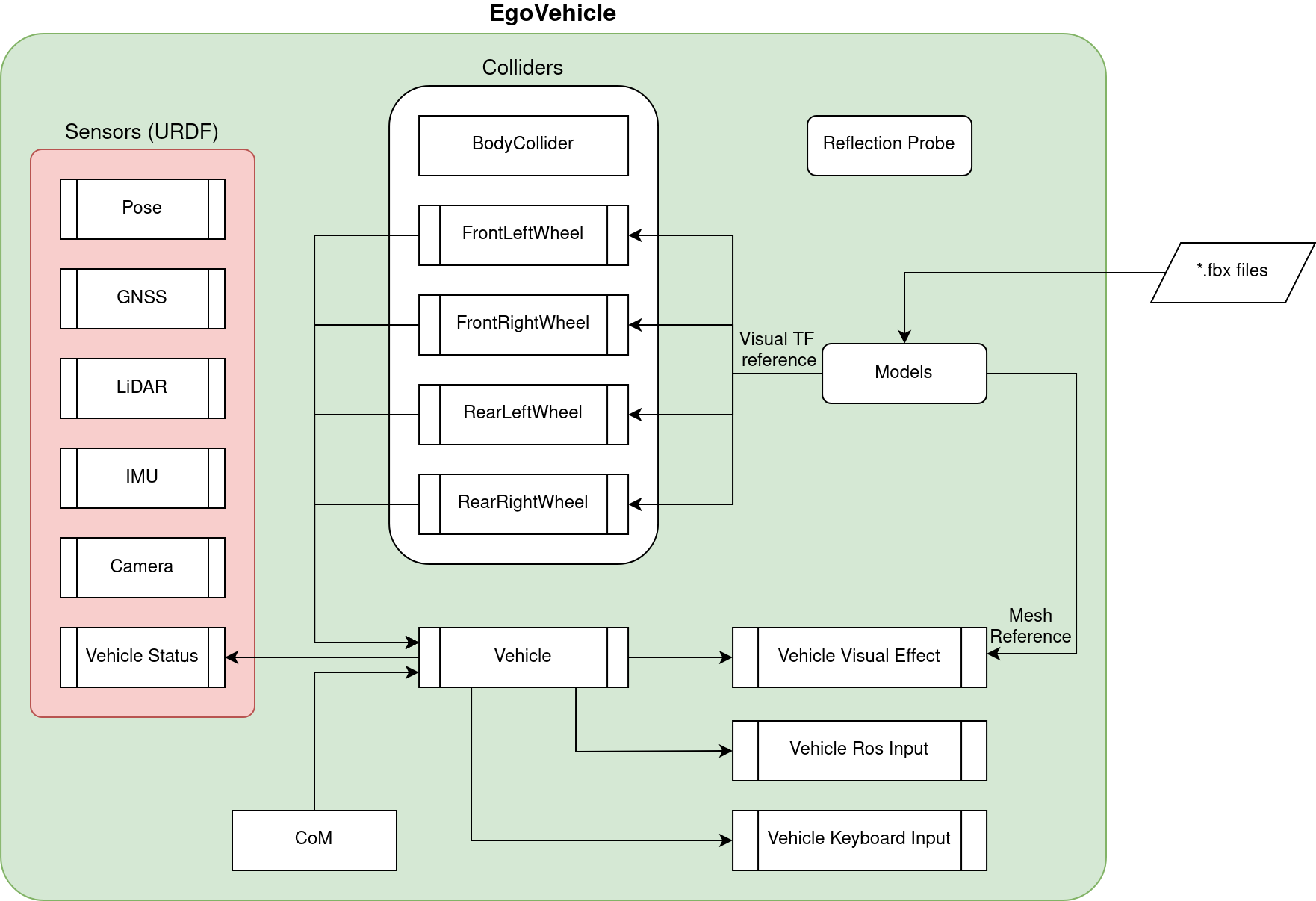
EgoVehicle is a component responsible for simulating an autonomous vehicle moving around the scene. It includes:
ModelsandReflection Probecomponents related to its visual appearance.Collidersproviding collisions and the ability to move on roads.Sensorsproviding data related to the state of the vehicle, including its position and speed inEnvironmentand the state of its surroundings.Vehiclecomponent that simulates dynamics, controls**Wheeland is responsible for ensuring their movement.Vehicle Ros InputandVehicle Keyboard Inputcomponents that have a reference to theVehicleobject and set control commands in it.Vehicle Visual Effectprovides an interface forVehicleto control the lighting.
A detailed description of EgoVehicle and its components mentioned above can be found here. The sensor placement on EgoVehicle used in the default scene is described here. Details about each of the individual sensors are available in the following sections: Pose, GNSS, LiDAR, IMU, Camera, Vehicle Status.
FixedUpdate Limitation
In AWSIM, the sensors' publishing methods are triggered from the FixedUpdate function and the output frequency is controlled by:
time += Time.deltaTime;
var interval = 1.0f / OutputHz;
interval -= 0.00001f; // Allow for accuracy errors.
if (time < interval)
return;
timer = 0;
Since this code runs within the FixedUpdate method, it's essential to note that Time.deltaTime is equal to Fixed Timestep, as stated in the Unity Time.deltaTime documentation. Consequently, with each invocation of FixedUpdate, the time variable in the sensor script will increment by a constant value of Fixed Timestep, independent of the actual passage of real-time. Additionally, as outlined in the Unity documentation, the FixedUpdate method might execute multiple times before the Update method is called, resulting in extremely small time intervals between successive FixedUpdate calls. The diagram below illustrates the mechanism of invoking the FixedUpdate event function."

During each frame (game tick) following actions are performed:
- first, the
Delta Timeis calculated as the difference between the current frame and the previous frame, - next, the
Delta Timeis added to theTime(regular time), - afterward, a check is made to determine how much
Fixed Time(physics time) is behind theTime, - if the difference between
TimeandFixed Timeis equal to or greater thenFixed Timestep, theFixed Updateevent function is invoked, - if
FixedUpdatefunction were called, theFixed Timestepis added to theFixed Time, - once again, a check is performed to assess how much
Fixed Timeis behind theTime, - if necessary, the
FixedUpdatefunction is called again, - if the difference between the
Timeand theFixed Timeis smaller than theFixed Timestep, theUpdatemethod is called, followed be scene rendering and other Unity event functions.
As a consequence, this engine feature may result in unexpected behavior when FPS (Frames Per Second) are unstable or under certain combinations of FPS, Fixed Timestep, and sensor OutputHz
In case of low frame rates, it is advisable to reduce the Time Scale of the simulation. The Time Scale value impacts simulation time, which refers to the time that is simulated within the model and might or might not progress at the same rate as real-time. Therefore, by reducing the time scale, the progression of simulation time slows down, allowing the simulation more time to perform its tasks.