Scenes
In the AWSIM Unity project there is one main scene (AutowareSimulation) and several additional ones that can be helpful during development. This section describes the purpose of each scene in the project.
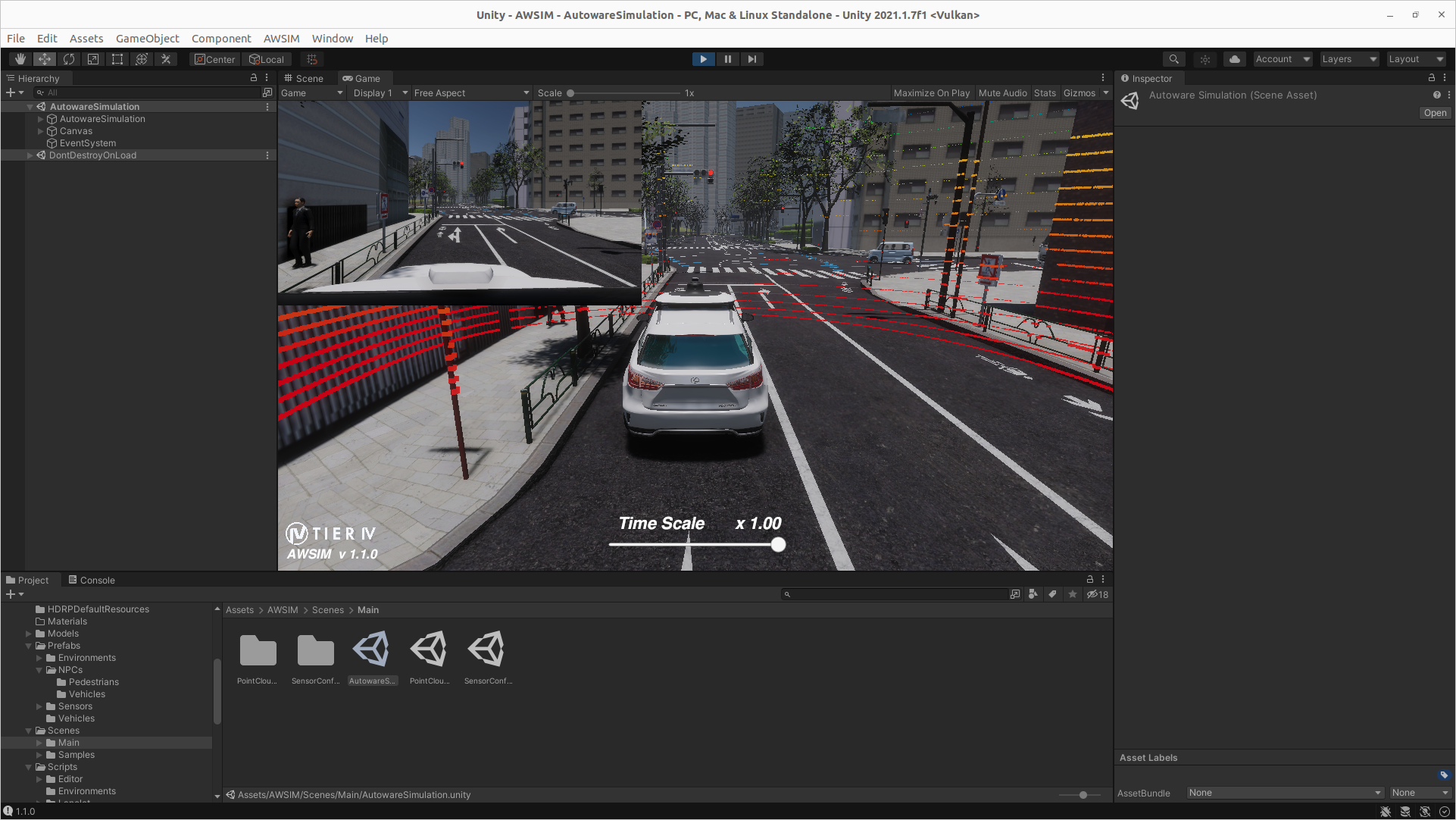
AutowareSimulation
The AutowareSimulation scene is the main scene that is designed to run the AWSIM simulation together with Autoware.
It allows for effortless operation, just run this scene, run Autoware with the correct map file and everything should work right out of the box.
PointCloudMapping
The PointCloudMapping is a scene that is designed to create a point cloud using the Unity world.
Using the RGLUnityPlugin and prefab Environment - on which there are models with Meshes - we are able to obtain a *.pcd file of the simulated world.
SensorConfig
Scene SensorConfig was developed to perform a quick test of sensors added to the EgoVehicle prefab.
Replace the Lexus prefab with a vehicle prefab you developed and check whether all data that should be published is present, whether it is on the appropriate topics and whether the data is correct.
NPCVehicleSample
The NPCVehicleSample was developed to conduct a quick test of the developed vehicle.
Replace the taxi prefab with a vehicle prefab you developed (EgoVehicle or NPCVehicle) and check whether the basic things are configured correctly.
The description of how to develop your own vehicle and add it to the project is in this section.
NPCPedestrianSample
The NPCPedestrianSample was developed to conduct a quick test of the developed pedestrian.
Replace the NPC prefab in NPC Pedestrian Test script with a prefab you developed and check whether the basic things are configured correctly.
TrafficIntersectionSample
The TrafficIntersectionSample was developed to conduct a quick test of the developed traffic intersection.
Replace the intersection configuration with your own and check whether it works correctly.
You can add additional groups of lights and create much larger, more complex sequences.
A description of how to configure your own traffic intersection is in this section.
TrafficLightSample
The TrafficLightSample was developed to conduct a quick test of a developed traffic lights model in cooperation with the script controlling it.
Replace the lights and configuration with your own and check whether it works correctly.
RandomTrafficYielding
The RandomTrafficYielding was developed to conduct a tests of a developed yielding rules at the single intersection.
RandomTrafficYieldingBirdEye
The RandomTrafficYielding was developed to conduct a tests of a developed yielding rules with multiple vehicles moving around the entire environment.

RGL test scenes
The scenes described below are used for tests related to the external library RGLUnityPlugin (RGL) - you can read more about it in this section.
LidarSceneDevelopSample
The scene LidarSceneDevelopSample can be used as a complete, minimalistic example of how to setup RGL.
It contains RGLSceneManager component, four lidars, and an environment composed of floor and walls.
LidarSkinnedStress
The scene LidarSkinnedStress can be used to test the performance of RGL.
E.g. how performance is affected when using Regular Meshes compared to Skinned Meshes.
The scene contains a large number of animated models that require meshes to be updated every frame, thus requiring more resources (CPU and data exchange with GPU).
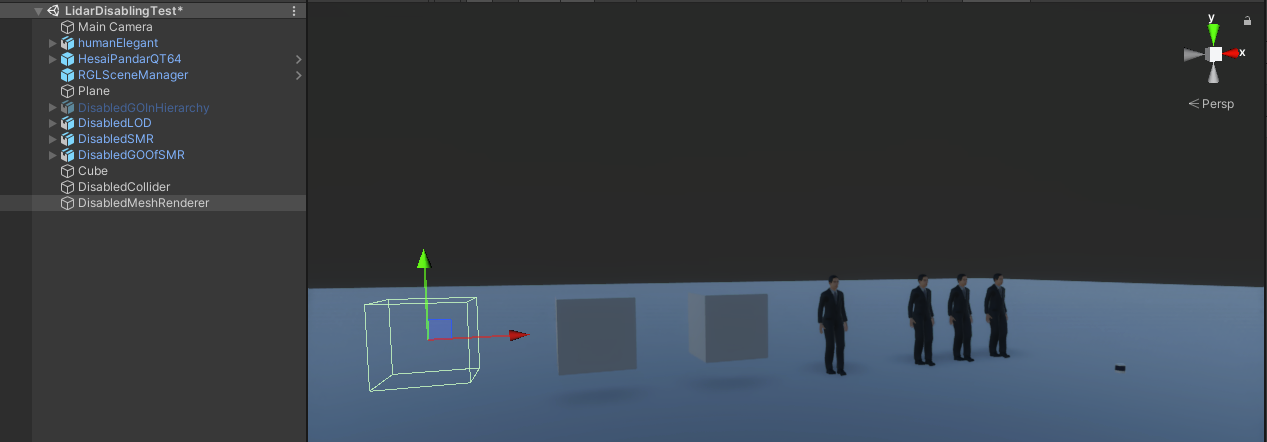
LidarDisablingTest
The scene LidarDisablingTest can be used to test RGL performance with similar objects but with different configurations.
It allows you to check whether RGL works correctly when various components that can be sources of Meshes are disabled (Colliders, Regular Meshes, Skinned Meshes, ...).
LidarInstanceSegmentationDemo
The LidarInstanceSegmentationDemo is a demo scene for instance segmentation feature. It contains a set of GameObjects with ID assigned and sample lidar that publishes output to the ROS2 topic. The GameObjects are grouped to present different methods to assign IDs.
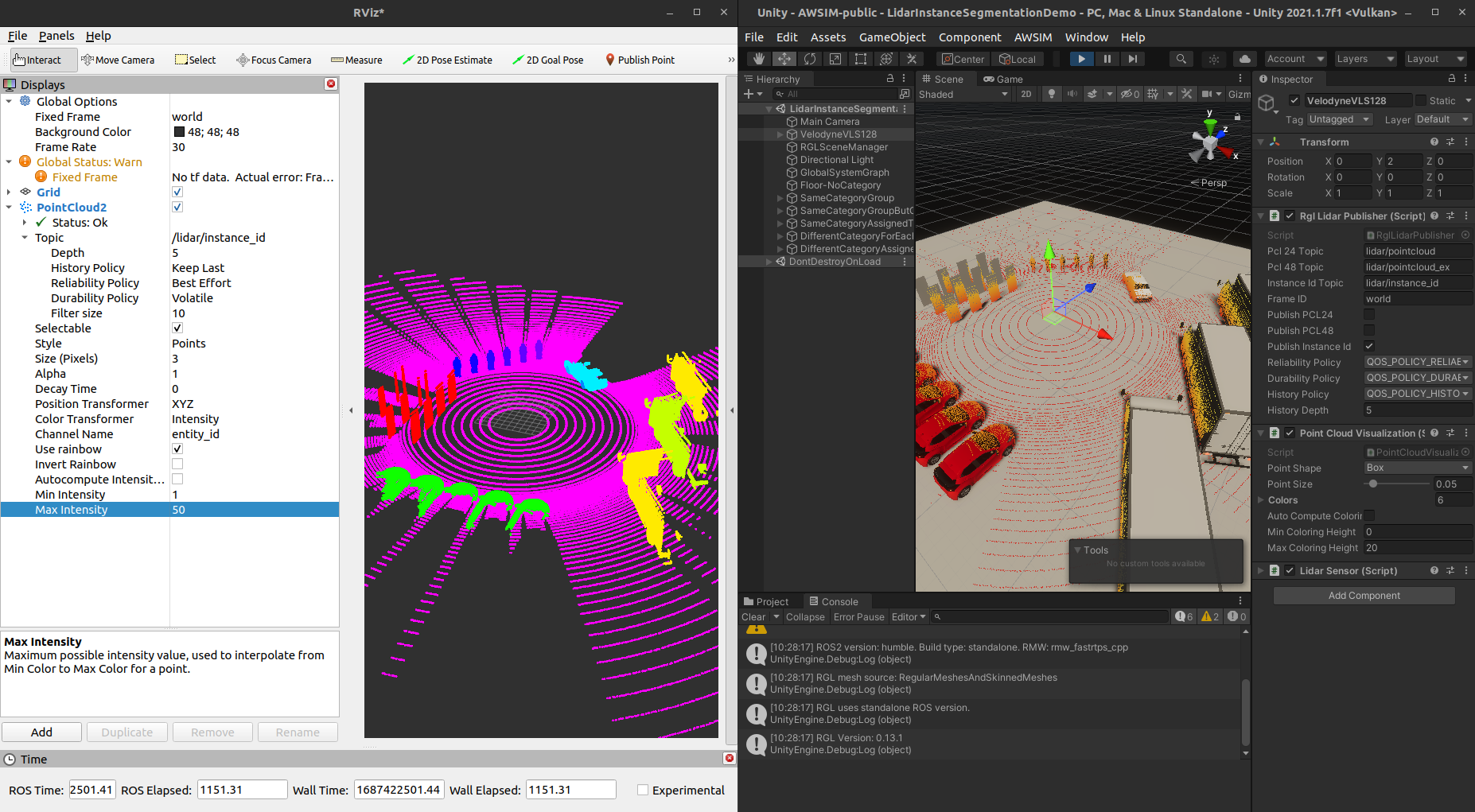
To run demo scene:
- Open scene:
Assets/AWSIM/Scenes/Samples/LidarInstanceSegmentationDemo.unity - Run simulation
- Open
rviz2 - Setup
rviz2as follows:- Fixed frame:
world, - PointCloud2 topic:
lidar/instance_id, - Topic
QoSas in the screen above. - Channel name:
enitity_id, - To better visualization disable
Autocomputeintensity and set min to0and max to50.
- Fixed frame:
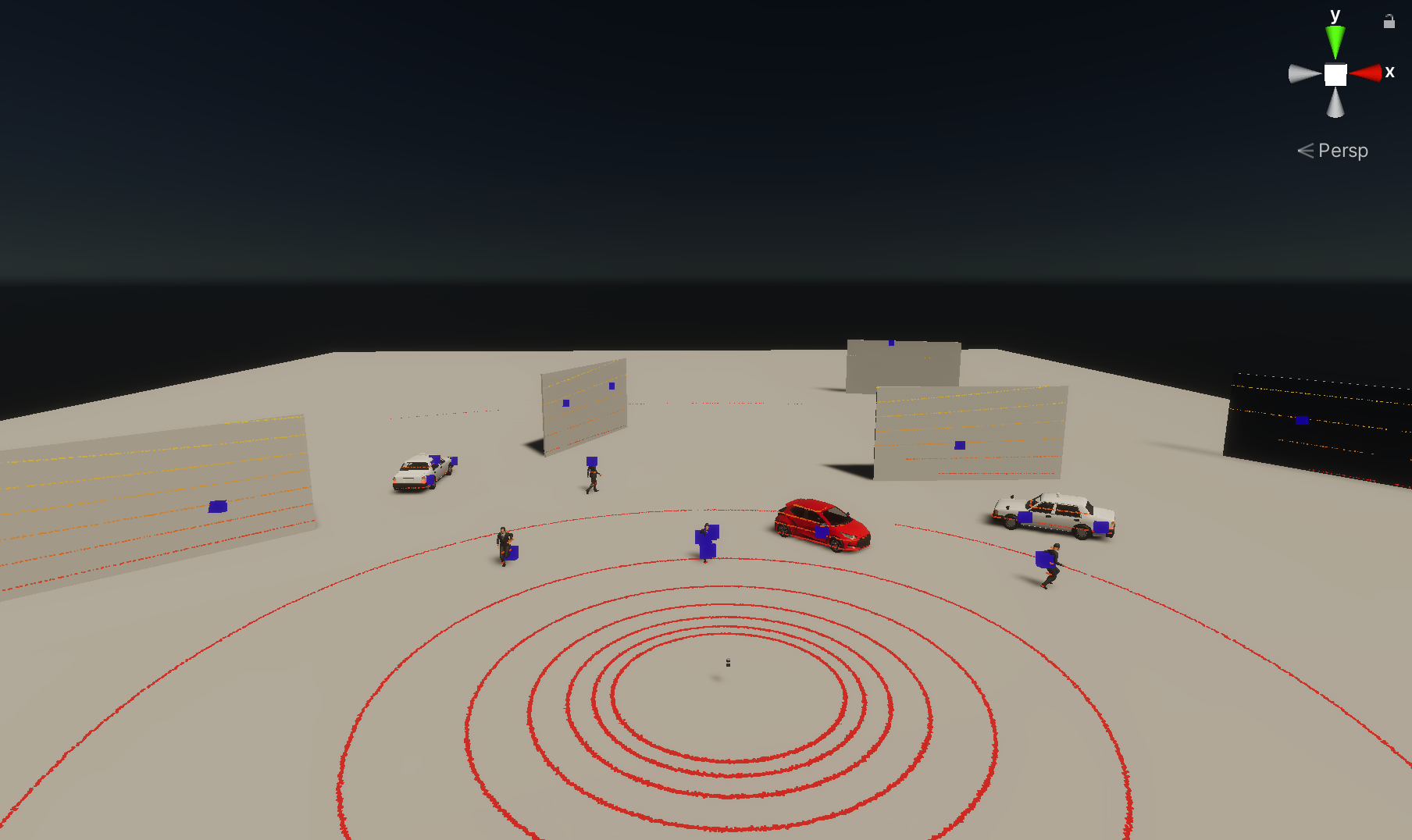
RadarSceneDevelopSample
The scene RadarSceneDevelopSample demonstrates the use of the RadarSensor component along with LiDARSensor.
LiDAR hit points are shown as small red points, and radar hit points are shown as bigger blue boxes.