ROS2 For Unity
Ros2ForUnity (R2FU) module is a communication solution that effectively connects Unity and the ROS2 ecosystem, maintaining a strong integration.
Unlike other solutions, it doesn't rely on bridging communication but rather utilizes the ROS2 middleware stack (specifically the rcl layer and below), enabling the inclusion of ROS2 nodes within Unity simulations.
R2FU is used in AWSIM for many reasons.
First of all, because it offers high-performance integration between Unity and ROS2, with improved throughput and lower latencies compared to bridging solutions.
It provides real ROS2 functionality for simulation entities in Unity, supports standard and custom messages, and includes convenient abstractions and tools, all wrapped as a Unity asset.
For a detailed description, please see README.
Prerequisites
This asset can be prepared in two flavours:
- standalone mode - where no ROS2 installation is required on target machine, e.g., your Unity simulation server. All required dependencies are installed and can be used e.g. as a complete set of Unity plugins.
- overlay mode - where the ROS2 installation is required on target machine. Only asset libraries and generated messages are installed therefore ROS2 instance must be sourced.
By default, asset R2FU in AWSIM is prepared in standalone mode.
Warning
To avoid internal conflicts between the standalone libraries, and sourced ones, ROS2 instance shouldn't be sourced before running AWSIM or the Unity Editor.
Can't see topics
There are no errors but I can't see topics published by R2FU
- Make sure your DDS (Localhost settings) config is correct.
- Sometimes ROS2 daemon brakes up when changing network interfaces or ROS2 version.
Try to stop it forcefully (pkill -9 ros2_daemon) and restart (ros2 daemon start).
Concept
Describing the concept of using R2FU in AWSIM, we distinguish:
- ROS2Node - it is the equivalent of a node in ROS2, it has its own name, it can have any number of subscribers, publishers, service servers and service clients. In the current AWSIM implementation, there is only one main node.
- ROS2Clock - it is responsible for generating the simulation time using the selected source.
- SimulatorROS2Node - it is a class that is directly responsible for AWSIM<->ROS2 communication, and contains one instance each of ROS2Node and ROS2Clock, so it creates the main AWSIM node in ROS2 and simulates the time from the selected source (currently UnityTimeSource is used).
It is initialized at the moment of running the scene in Unity - thanks to the
RuntimeInitializeOnLoadMethodmark. - Publisher - it is the equivalent of the publisher in ROS2, it uses a single topic on which it can publish a selected type of message, and it has a selected QoS profile. Each publisher in AWSIM is created in ROS2Node object of class SimulatorROS2Node.
- Subscriber - it is the equivalent of the subscriber in ROS2, it uses a single topic from which it subscribes to the selected type of message, and it has a selected QoS profile. Each subscriber in AWSIM is created in ROS2Node object of class SimulatorROS2Node.
The SimulatorROS2Node implementation, thanks to the use of R2FU, allows you to add communication via ROS2 to any Unity component.
For example, we can receive control commands from any other ROS2 node and publish the current state of Ego, such as its position in the environment.
Simulation time
If you want to use system time (ROS2 time) instead of Unity time, use ROS2TimeSource instead of UnityTimeSource in the SimulatorROS2Node class.
Package structure
Ros2ForUnity asset contains:
- Plugins - dynamically loaded libraries for Windows and Linux (
*.dlland*.sofiles). In addition to the necessary libraries, here are the libraries created as a result of generation the types of ROS2 messages that are used in communication. - Scripts - scripts for using
R2FUin Unity - details below. - Extension Scripts - scripts for using
R2FUin AWSIM, provide abstractions of a single main Node and simplify the interface - details below. These scripts are not in the library itself, but directly in the directoryAssets/AWSIM/Scripts/ROS/**.
Scripts
ROS2UnityCore- the principal class for handling ROS2 nodes and executables. Spins and executes actions (e.g. clock, sensor publish triggers) in a dedicated thread.ROS2UnityComponent-ROS2UnityCoreadapted to work as a Unity component.ROS2Node- a class representing a ROS2 node, it should be constructed throughROS2UnityComponentclass, which also handles spinning.ROS2ForUnity- an internal class responsible for handling checking, proper initialization and shutdown of ROS2 communication,ROS2ListenerExample- an example class provided for testing of basic ROS2->Unity communication.ROS2TalkerExample- an example class provided for testing of basic Unity->ROS2 communication.ROS2PerformanceTest- an example class provided for performance testing of ROS2<->Unity communication.Sensor- an abstract base class for ROS2-enabled sensor.Transformations- a set of transformation functions between coordinate systems of Unity and ROS2.PostInstall- an internal class responsible for installingR2FUmetadata files.Timescripts - a set of classes that provide the ability to use different time sources:ROS2Clock- ROS2 clock class that for interfacing between a time source (Unity or ROS2 system time) and ROS2 messages.ROS2TimeSource- acquires ROS2 time (system time by default).UnityTimeSource- acquires Unity time.DotnetTimeSource- acquires UnityDateTimebased clock that has resolution increased usingStopwatch.ITimeSource- interface for general time extraction from any source.TimeUtils- utils for time conversion.
Extension Scripts
Additionally, in order to adapt AWSIM to the use of R2FU, the following scripts are used:
SimulatorROS2Node- it is a class that is directly responsible for AWSIM<->ROS2 communication.-
ClockPublisher- allows the publication of the simulation time from the clock running in the SimulatorROS2Node. It must be added as a component to the scene in order to publish the current time when the scene is run.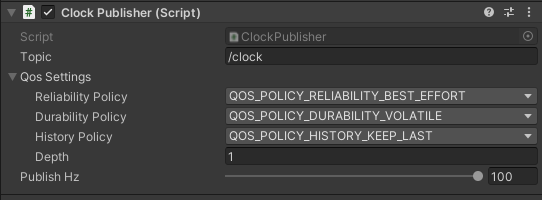
-
QoSSettings- it is the equivalent of ROS2 QoS, which allows to specify the QoS for subscribers and publishers in AWSIM. It uses theQualityOfServiceProfileimplementation from the Ros2cs library. ROS2Utility- it is a class with utils that allow, for example, to convert positions in the ROS2 coordinate system to the AWSIM coordinate system.DiagnosticsManager- prints diagnostics for desired elements described in*.yamlconfig file.
Default message types
The basic ROS2 msgs types that are supported in AWSIM by default include:
In order for the message package to be used in Unity, its *.dll and *.so libraries must be generated using R2FU.
Custom message
If you want to generate a custom message to allow it to be used in AWSIM please read this tutorial.
Use of generated messages in Unity
Each message type is composed of other types - which can also be a complex type.
All of them are based on built-in C# types.
The most common built-in types in messages are bool, int, double and string.
These types have their communication equivalents using ROS2.
A good example of a complex type that is added to other complex types in order to specify a reference - in the form of a timestamp and a frame - is std_msgs/Header. This message has the following form:
builtin_interfaces/msg/Time stamp
string frame_id
ROS2 directive
In order to work with ROS2 in Unity, remember to add the directive using ROS2; at the top of the file to import types from this namespace.
Create an object
The simplest way to create an object of Header type is:
var header = new std_msgs.msg.Header()
{
Frame_id = "map"
}
It is not required to define the value of each field.
As you can see, it creates an object, filling only frame_id field - and left the field of complex builtin_interfaces/msg/Time type initialized by default.
Time is an important element of any message, how to fill it is written here.
Accessing and filling in message fields
As you might have noticed in the previous example, a ROS2 message in Unity is just a structure containing the same fields - keep the same names and types. Access to its fields for reading and filling is the same as for any C# structure.
var header2 = new std_msgs.msg.Header();
header2.Frame_id = "map";
header2.Stamp.sec = "1234567";
Debug.Log($"StampSec: {header2.Stamp.sec} and Frame: {header2.Frame_id}");
Field names
There is one always-present difference in field names. The first letter of each message field in Unity is always uppercase - even if the base ROS2 message from which it is generated is lowercase.
Filling a time
In order to complete the time field of the Header message, we recommend the following methods in AWSIM:
-
When the message has no
Headerbut only theTimetype:var header2 = new std_msgs.msg.Header(); header2.Stamp = SimulatorROS2Node.GetCurrentRosTime(); -
When the message has a
Header- like for example autoware_vehicle_msgs/VelocityReport:velocityReportMsg = new autoware_vehicle_msgs.msg.VelocityReport() { Header = new std_msgs.msg.Header() { Frame_id = "map", } }; var velocityReportMsgHeader = velocityReportMsg as MessageWithHeader; SimulatorROS2Node.UpdateROSTimestamp(ref velocityReportMsgHeader);
These methods allow to fill the Time field in the message object with the simulation time - from ROS2Clock
Create a message with array
Some message types contain an array of some type.
An example of such a message is nav_msgs/Path, which has a PoseStamped array.
In order to fill such an array, you must first create a List<T>, fill it and then convert it to a raw array.
var posesList = new List<geometry_msgs.msg.PoseStamped>();
for(int i=0; i<=5;++i)
{
var poseStampedMsg = new geometry_msgs.msg.PoseStamped();
poseStampedMsg.Pose.Position.X = i;
poseStampedMsg.Pose.Position.Y = 5-i;
var poseStampedMsgHeader = poseStampedMsg as MessageWithHeader;
SimulatorROS2Node.UpdateROSTimestamp(ref poseStampedMsgHeader);
posesList.Add(poseStampedMsg);
}
var pathMsg = new nav_msgs.msg.Path(){Poses=posesList.ToArray()};
var pathMsgHeader = pathMsg as MessageWithHeader;
SimulatorROS2Node.UpdateROSTimestamp(ref pathMsgHeader);
// pathMsg is ready
Publish on the topic
In order to publish messages, a publisher object must be created.
The static method CreatePublisher of the SimulatorROS2Node makes it easy.
You must specify the type of message, the topic on which it will be published and the QoS profile.
Below is an example of autoware_vehicle_msgs.msg.VelocityReport type message publication with a frequency of 30Hz on /vehicle/status/velocity_status topic, the QoS profile is (Reliability=Reliable, Durability=Volatile, History=Keep last, Depth=1):
using UnityEngine;
using ROS2;
namespace AWSIM
{
public class VehicleReportRos2Publisher : MonoBehaviour
{
float timer = 0;
int publishHz = 30;
QoSSettings qosSettings = new QoSSettings()
{
ReliabilityPolicy = ReliabilityPolicy.QOS_POLICY_RELIABILITY_RELIABLE,
DurabilityPolicy = DurabilityPolicy.QOS_POLICY_DURABILITY_VOLATILE,
HistoryPolicy = HistoryPolicy.QOS_POLICY_HISTORY_KEEP_LAST,
Depth = 1,
};
string velocityReportTopic = "/vehicle/status/velocity_status";
autoware_vehicle_msgs.msg.VelocityReport velocityReportMsg;
IPublisher<autoware_vehicle_msgs.msg.VelocityReport> velocityReportPublisher;
void Start()
{
// Create a message object and fill in the constant fields
velocityReportMsg = new autoware_vehicle_msgs.msg.VelocityReport()
{
Header = new std_msgs.msg.Header()
{
Frame_id = "map",
}
};
// Create publisher with specific topic and QoS profile
velocityReportPublisher = SimulatorROS2Node.CreatePublisher<autoware_vehicle_msgs.msg.VelocityReport>(velocityReportTopic, qosSettings.GetQoSProfile());
}
bool NeedToPublish()
{
timer += Time.deltaTime;
var interval = 1.0f / publishHz;
interval -= 0.00001f;
if (timer < interval)
return false;
timer = 0;
return true;
}
void FixedUpdate()
{
// Provide publications with a given frequency
if (NeedToPublish())
{
// Fill in non-constant fields
velocityReportMsg.Longitudinal_velocity = 1.00f;
velocityReportMsg.Lateral_velocity = 0.00f;
velocityReportMsg.Heading_rate = 0.00f;
// Update Stamp
var velocityReportMsgHeader = velocityReportMsg as MessageWithHeader;
SimulatorROS2Node.UpdateROSTimestamp(ref velocityReportMsgHeader);
// Publish
velocityReportPublisher.Publish(velocityReportMsg);
}
}
}
}
Upper limit to publish rate
The above example demonstrates the implementation of the 'publish' method within the FixedUpdate Unity event method. However, this approach has certain limitations. The maximum output frequency is directly tied to the current value of Fixed TimeStep specified in the Project Settings. Considering that the AWSIM is targeting a frame rate of 60 frames per second (FPS), the current Fixed TimeStep is set to 1/60s. And this impose 60Hz as a limitation on the publish rate for any sensor, which is implemented within FixedUpdate method. In case a higher output frequency be necessary, an alternative implementation must be considered or adjustments made to the Fixed TimeStep setting in the Editor->Project Settings->Time.
The table provided below presents a list of sensors along with examples of topics that are constrained by the Fixed TimeStep limitation.
| Object | Topic |
|---|---|
| GNSS Sensor | /sensing/gnss/pose |
| IMU Sensor | /sensing/imu/tamagawa/imu_raw |
| Traffic Camera | /sensing/camera/traffic_light/image_raw |
| Pose Sensor | /awsim/ground_truth/vehicle/pose |
| OdometrySensor | /awsim/ground_truth/localization/kinematic_state |
| LIDAR | /sensing/lidar/top/pointcloud_raw |
| Vehicle Status | /vehicle/status/velocity_status |
If the sensor or any other publishing object within AWSIM does not have any direct correlation with physics (i.e., does not require synchronization with physics), it can be implemented without using the FixedUpdate method. Consequently, this allows the bypass of upper limits imposed by the Fixed TimeStep.
The table presented below shows a list of objects that are not constrained by the Fixed TimeStep limitation.
| Object | Topic |
|---|---|
| Clock | /clock |
Subscribe to the topic
In order to subscribe messages, a subscriber object must be created.
The static method CreateSubscription of the SimulatorROS2Node makes it easy.
You must specify the type of message, the topic from which it will be subscribed and the QoS profile.
In addition, the callback must be defined, which will be called when the message is received - in particular, it can be defined as a lambda expression.
Below is an example of std_msgs.msg.Bool type message subscription on /vehicle/is_vehicle_stopped topic, the QoS profile is “system default”:
using UnityEngine;
using ROS2;
namespace AWSIM
{
public class VehicleStoppedSubscriber : MonoBehaviour
{
QoSSettings qosSettings = new QoSSettings();
string isVehicleStoppedTopic = "/vehicle/is_vehicle_stopped";
bool isVehicleStopped = false;
ISubscription<std_msgs.msg.Bool> isVehicleStoppedSubscriber;
void Start()
{
isVehicleStoppedSubscriber = SimulatorROS2Node.CreateSubscription<std_msgs.msg.Bool>(isVehicleStoppedTopic, VehicleStoppedCallback, qosSettings.GetQoSProfile());
}
void VehicleStoppedCallback(std_msgs.msg.Bool msg)
{
isVehicleStopped = msg.Data;
}
void OnDestroy()
{
SimulatorROS2Node.RemoveSubscription<std_msgs.msg.Bool>(isVehicleStoppedSubscriber);
}
}
}