VehicleStatusSensor
Introduction
VehicleStatusSensor is a component that is designed to aggregate information about the current state of the vehicle.
It aggregates information about:
- Control mode - currently active control mode, e.g.
AUTONOMOUSorMANUAL. - Gear status - currently engaged gearbox gear, e.g.
DRIVEorREVERSE. - Steering status - current angle of the steering tire in radians left, e.g.
0.1745(10°). - Turn indicators status - current status of the direction indicators, e.g.
DISABLEorENABLE_LEFT. - Hazard lights status - current status of the hazard lights, e.g.
DISABLEorENABLE. - Velocity status - current lateral, longitudinal and heading velocities values, e.g
{0.2, 0.0, 0.0}.
Prefab
Prefab can be found under the following path:
Assets/AWSIM/Prefabs/Sensors/VehicleStatusSensor.prefab
Link in the default Scene
This sensor is added directly to the URDF link in the EgoVehicle prefab.

A detailed description of the URDF structure and sensors added to prefab Lexus RX450h 2015 is available in this section.
Components
All features are implemented within the Vehicle Report Ros2 Publisher (script) which can be found under the following path:
Assets/AWSIM/Prefabs/Sensors/*
Vehicle Report Ros2 Publisher (script)
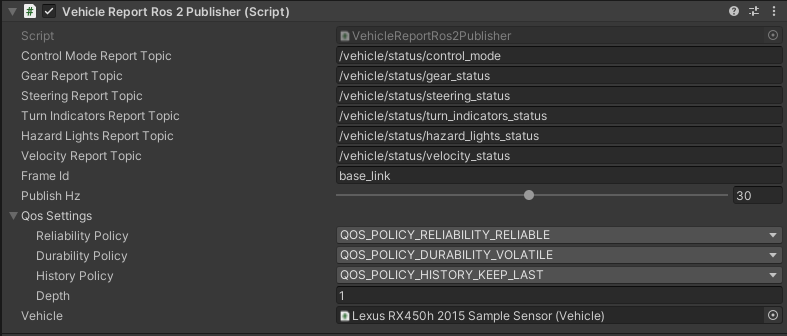
The script is responsible for updating and publishing each of the aggregated data on a separate topic. Therefore, it has 6 publishers publishing the appropriate type of message with a constant frequency - one common for all data.
Elements configurable from the editor level
* Report Topic- topic on which suitable type of information is published
(default: listed in the table below)Publish Hz- frequency of publications on each topic
(default:30Hz)Frame ID- frame in which data is published, used inHeader
(default:base_link)QoS- Quality of service profile used in the publication
(default assumed as"system_default":Reliable,Volatile,Keep last/1)Vehicle- the object from which all published data are read
(default:None)
Vehicle configuration
An important element of the script configuration that must be set is the scene Object (Vehicle).
It will be used for reading all the data needed.
The appropriate EgoVehicle object should be selected.
If you can't select the right object, make sure it's set up correctly - it has got added all the scripts needed for EgoVehicle.
Published topics
- Frequency:
30Hz - QoS:
Reliable,Volatile,Keep last/1
| Category | Topic | Message type | frame_id |
|---|---|---|---|
| Control mode | /vehicle/status/control_mode |
autoware_vehicle_msgs/ControlModeReport |
- |
| Gear status | /vehicle/status/gear_status |
autoware_vehicle_msgs/GearReport |
- |
| Steering status | /vehicle/status/steering_status |
autoware_vehicle_msgs/SteeringReport |
- |
| Turn indicators status | /vehicle/status/turn_indicators_status |
autoware_vehicle_msgs/TurnIndicatorsReport |
- |
| Hazard lights status | /vehicle/status/hazard_lights_status |
autoware_vehicle_msgs/HazardLightsReport |
- |
| Velocity status | /vehicle/status/velocity_status |
autoware_vehicle_msgs/VelocityReport |
base_line |