GnssSensor
Introduction
GnssSensor is a component which simulates the position of vehicle computed by the Global Navigation Satellite System based on the transformation of the GameObject to which this component is attached.
The GnssSensor outputs the position in the MGRS coordinate system.
Prefab
Prefab can be found under the following path:
Assets/AWSIM/Prefabs/Sensors/GnssSensor.prefab
Link
GnssSensor has its own frame gnss_link in which its data is published.
The sensor prefab is added to this frame.
The gnss_link frame is added to the sensor_kit_base_link in the base_link object located in the URDF.
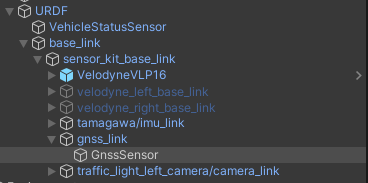
A detailed description of the URDF structure and sensors added to prefab Lexus RX450h 2015 is available in this section.
Components
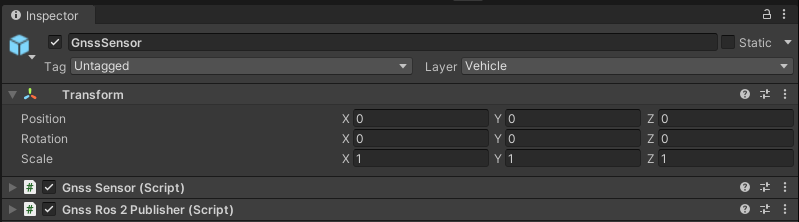
The GnssSensor functionality is split into two components:
- Gnss Sensor (script) - it calculates the position as its output and calls the callback for it.
- Gnss Ros2 Publisher (script) - provides the ability to publish
GnssSensoroutput asPoseStampedand PoseWithCovarianceStamped published on a specific ROS2 topics.
Scripts can be found under the following path:
Assets/AWSIM/Prefabs/Sensors/Gnss/*
Gnss Sensor (script)

This is the main script in which all calculations are performed:
- the position of the Object in Unity is read,
- this position is transformed to the ROS2 coordinate system (MGRS offset is added here),
- the result of the transformation is saved as the output of the component,
- for the current output a
callbackis called (which can be assigned externally).
Elements configurable from the editor level
Output Hz- frequency of output calculation and callback (default:100Hz)
Output Data
| Category | Type | Description |
|---|---|---|
| Position | Vector3 | Position in the MGRS coordinate system. |
Gnss Ros2 Publisher (script)

Converts the data output from GnssSensor to ROS2 PoseStamped and PoseWithCovarianceStamped messages.
These messages are published on two separate topics for each type.
The conversion and publication is performed using the Publish(GnssSensor.OutputData outputData) method, which is the callback triggered by Gnss Sensor (script) for the current output update.
Covariance matrix
The row-major representation of the 6x6 covariance matrix is filled with 0 and does not change during the script run.
Elements configurable from the editor level
Pose Topic- the ROS2 topic on which the messagePoseStampedtype is published
(default:"/sensing/gnss/pose")Pose With Covariance Stamped Topic- the ROS2 topic on which the message PoseWithCovarianceStamped type is published
(default:"/sensing/gnss/pose_with_covariance")Frame id- frame in which data are published, used inHeader
(default:"gnss_link")Qos Settings- Quality of service profile used in the publication
(default is assumed as"system_default":Reliable,Volatile,Keep last,1)
Published Topics
- Frequency:
1Hz - QoS:
Reliable,Volatile,Keep last/1
| Category | Topic | Message type | frame_id |
|---|---|---|---|
| Pose | /sensing/gnss/pose |
geometry_msgs/Pose |
gnss_link |
| Pose with Covariance | /sensing/gnss/pose_with_covariance |
geometry_msgs/PoseWithCovarianceStamped |
gnss_link |