2.1. Hardware setup#
As a first step, prepare your hardware including Sensor and ECU.
2.1.1. Sample hardware configuration#
This following hardware configuration is used throughout this tutorial.
ECU setup
x86-based ECU: ADLINK AVA-3510
Jetson-based ECU: ADLINK RQX-58G
Sensor setup
Sample configuration 1
Camera: TIER IV Automotive HDR Camera C1 (x2)
LiDAR: HESAI Pandar XT32 (x1)
Sample configuration 2
Camera: TIER IV Automotive HDR Camera C1 (x2)
LiDAR: HESAI AT128 (x1)
2.1.1.1. Connection diagram#
The figure below depicts the connection diagram between sensors and ECUs for this tutorial. This network configuration, including applying the IP addresses to the specific interface, will be automatically done during the steps in Installation page.
Internet connection is required for Installation step.
The next Installation step requires the internet connection for git clone and ML model download. Please connect an Ethernet cable to the port indicated in the figure below for the internet connection.
Note
Try another display port if nothing is shown on the display.
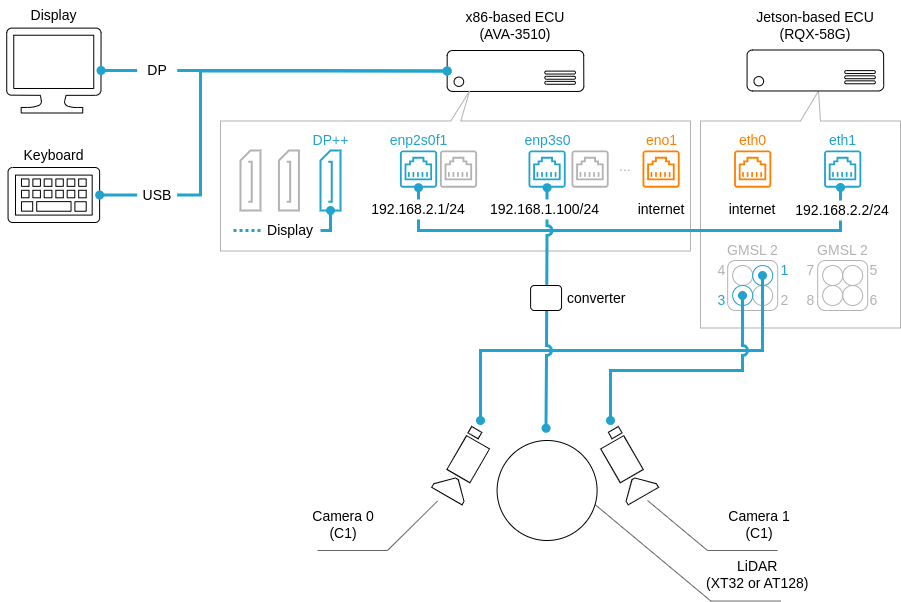
Fig. 2.1 connection diagram of the sample system#

Fig. 2.2 hardware setup of sample system#
2.1.1.2. Sensor driver#
Edge.Auto supports a variety of sensor types. The following repositories are used to make those sensors available in your ROS2 environment. Please refer to the each repositories for more details.
Camera driver
tier4/tier4_automotive_hdr_camera: Kernel driver for using TIER IV cameras with Video4Linux2 interface.
tier4/ros2_v4l2_camera: ROS2 package for camera driver using Video4Linux2.
LIDAR driver
tier4/nebula: ROS2 package for unified ethernet-based LiDAR driver.
Sensor synchronization
tier4/sensor_trigger: ROS2 package for generating sensor trigger signals.
2.1.1.3. Sensor/ECU synchronization#
In this sample system, clock synchronization and timing synchronization between sensors and ECUs are realized to achieve highly accurate sensor fusion. The figure below depicts the synchronization design between sensors and ECUs in this sample system.
For more details, please refer to the tier4/sensor_trigger repository.
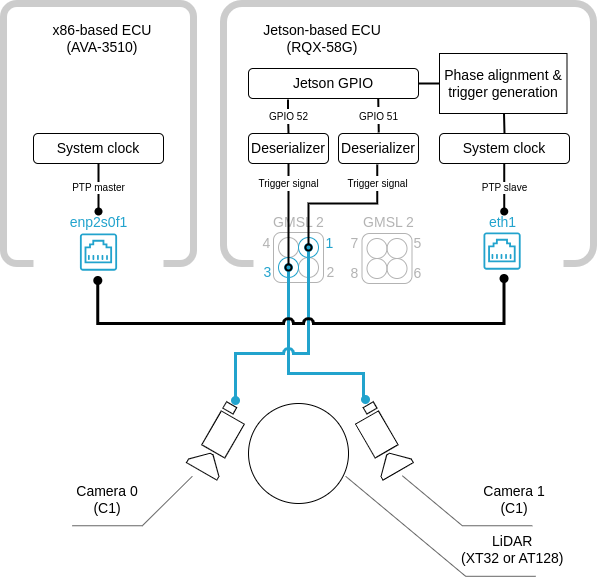
Fig. 2.3 Synchronization design of sample system#
2.1.2. x86-based ECU#
Before proceeding with 2.Installation step, install Ubuntu 22.04 to your x86-based ECU.
2.1.3. Jetson-based ECU#
Before proceeding with 2.Installation step, install NVIDIA L4T R32.6.1 (including Ubuntu 18.04) to your Jetson-based ECU.
BSP installation for ADLINK RQX-58G
RQX-58G needs to be properly configured according to the official quick start guide from ADLINK Technology, Inc. Please see the official document in detail.
To download the BSP image, please visit the ADLINK official page. (If you are accessing the site for the first time, you will be prompted to create an account.)
While the TIER IV camera driver (tier4/tier4_automotive_hdr_camera) is included in the RQX-58G BSP official image, you can also update it during the following setup process.