2.1. ハードウェアのセットアップ#
最初のステップとして、センサーと ECU を含むハードウェアを準備します。
2.1.1. ハードウェア構成例#
このチュートリアルでは、次のハードウェア構成が使用されます。
ECUセットアップ
x86 ベースの ECU: ADLINK AVA-3510
Jetson ベースの ECU: ADLINK RQX-58G
センサーのセットアップ
構成例1
カメラ: TIER IV Automotive HDR カメラ C1 (x2)
LiDAR: HESAI Pandar XT32 (x1)
構成例2
カメラ: TIER IV Automotive HDR カメラ C1 (x2)
LiDAR: HESAI AT128 (x1)
2.1.1.1. 接続図#
以下の図は、このチュートリアルのセンサーと ECU 間の接続を示しています。特定のインターフェイスへの IP アドレスの適用を含むこのネットワークの構成は、インストール ページの手順中に自動的に行われます。
インストールにはインターネット接続が必要です。
次の インストール ステップでは、git clone と ML モデルをダウンロードのため、インターネット接続が必要です。インターネット接続には、下図に示すポートにイーサネットケーブルを接続してください。
注釈
ディスプレイに何も表示されない場合は、別のディスプレイ ポートを試してください。
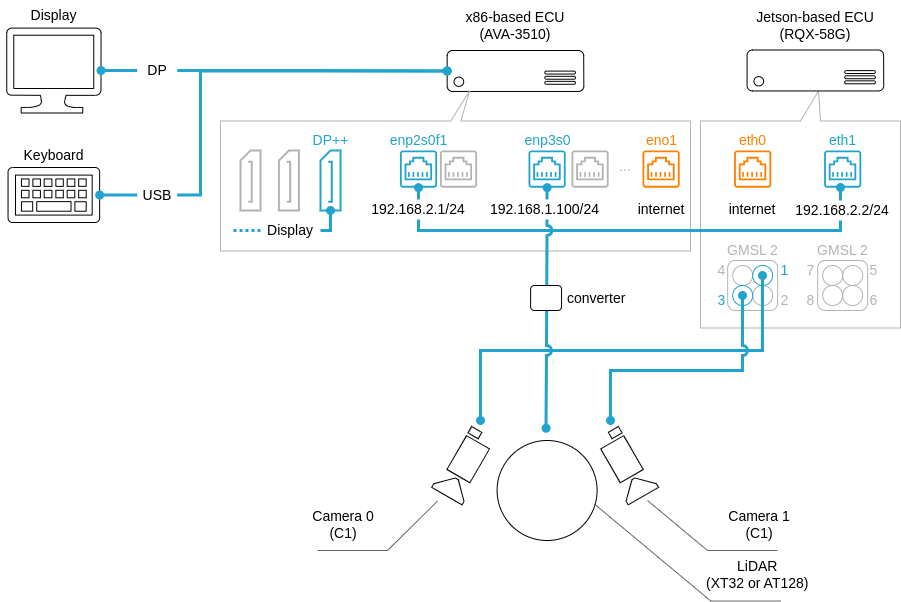
図 2.1 サンプルシステムの同期設計#

図 2.2 ハードウェアのセットアップ#
2.1.1.2. センサードライバ#
Edge.Auto は、さまざまなタイプのセンサーをサポートしています。これらのセンサーを ROS2 環境で利用できるようにするために、次のリポジトリを使用します。詳細については、各リポジトリを参照してください。
カメラドライバ
tier4/tier4_automotive_hdr_camera: Video4Linux2 インターフェイスで TIER IV カメラを使用するためのカーネル ドライバ
tier4/ros2_v4l2_camera: Video4Linux2 を使用するカメラドライバー用の ROS2 パッケージ
LIDARドライバ
tier4/nebula: イーサネットベースの統合 LiDAR ドライバの ROS2 パッケージ
センサー同期
tier4/sensor_trigger: センサー トリガー信号を生成するための ROS2 パッケージ
2.1.1.3. センサー/ECU同期#
本サンプルシステムでは、センサーとECU間のクロック同期やタイミング同期を実現し、高精度なセンサーフュージョンを実現します。以下の図は、このサンプル システムにおけるセンサーと ECU 間の同期設計を示しています。
詳細については、tier4/sensor_trigger リポジトリを参照してください。
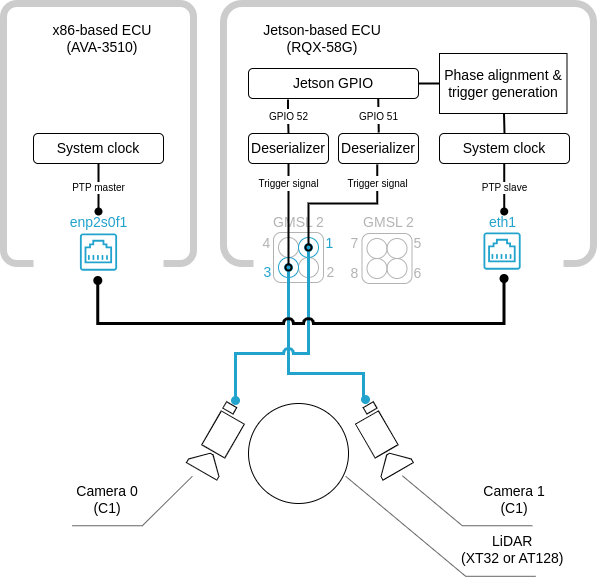
図 2.3 サンプルシステムの同期設計#
2.1.2. x86ベースのECU#
2.インストール の手順に進む前に、x86 ベースの ECU に Ubuntu 22.04 をインストールします。
2.1.3. Jetson ベースの ECU#
2.インストール の手順に進む前に、NVIDIA L4T R32.6.1 (Ubuntu 18.04 を含む) を Jetson ベースの ECU にインストールします。
ADLINK RQX-58G 用 BSP のインストール
RQX-58G は、ADLINK Technology, Inc. の公式クイック スタート ガイドに従って適切に設定する必要があります。公式ドキュメント を参照してください。
BSP イメージをダウンロードするには、ADLINK 公式ページ にアクセスしてください。 (初めてサイトにアクセスする場合は、アカウントの作成を求められます。)
TIER IV カメラ ドライバー (tier4/tier4_automotive_hdr_camera) は RQX-58G BSP 公式イメージに含まれていますが、次のセットアップ プロセス中に更新することもできます。