1.1. ADLINK ROSCube RQX-58G 用 TIER IV カメラ スタート ガイド#
注意
このドキュメントはversion 2.1.0をベースとして作成されています。
注意
このドキュメントはADLINK RQX-58Gのユーザー向けです。
注意
以下の番号以降のシリアル番号のC2カメラはRQX-58Gでは動作しません
C2-030: C2030P370201
C2-062: C2062P350150
C2-120: C2120P410508
C2-176: C2176P420150
1.1.1. 準備#
1.1.1.1. 機材#
注意
Jetpack4.5およびJetpack4.6をご利用の場合はカメラドライバーv2.0.0以前のバージョンをご利用ください。
ADLINK ROSCube-X RQX-58G
JetPack4.5 (L4T 32.5.1) または
JetPack4.5 (L4T 32.6.1) または
JetPack5.1.2 (L4T 35.4.1)
GMSL2 同軸ケーブル (FAKRA - mini FAKRA、1:4)
TIER IV 車載 HDR カメラ C1, C2 または C3
1.1.1.2. カメラの接続#
まず、ROSCube-X の電源がオフになっていることを確認します。
カメラをケーブルの FAKRA コネクタ (シングル FAKRA コネクタ側) に接続します。次に、ケーブルのミニ FAKRA コネクタを ROSCube-X の GMSL2 ポートに挿入します。
FAKRA コネクタおよびミニ FAKRA コネクタのロックの方向が正しいことを確認してください (図 1 ~ 3)。

図 1.1 RosCube#
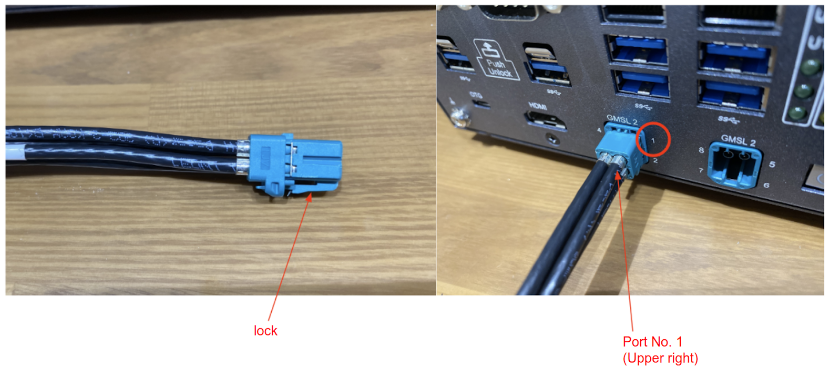
図 1.2 コネクタ#
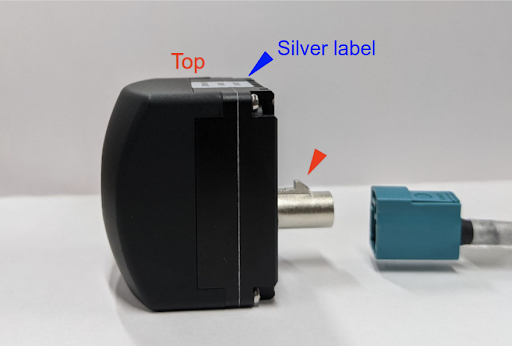
図 1.3 Fakraケーブル挿入方向#
1.1.2. 電源投入とカメラからの画像出力の確認#
1.1.2.1. 電源投入#
ROSCube-Xの電源を入れ、パワーオンLEDが青色に点灯することを確認します。
1.1.2.2. ログイン#
起動ウィンドウで、パスワードを入力してログインします。
デフォルトの設定は以下のとおりです。
ユーザー |
|
パスワード |
|
1.1.2.3. カメラドライバーのインストール#
バージョン v1.4.1 で追加: C2 camera support has beed added
バージョン v1.5.0 で追加: C3 camera support has beed added
Github から カメラドライバ deb パッケージ を入手します。最新リリースはRQX-58Gで動作することが確認されています。
提供されたドライバー パッケージ ファイル (tier4-camera-gmsl_*.*.*_arm64.deb) を ROSCube-X 内の任意のディレクトリ (例: ~/c1_driver) にコピーします。次に、以下の操作をコマンドラインで行います。
apt updateでパッケージを更新します。インターネット接続が必要です。次に、apt installコマンドを使用してドライバーをインストールします。*.dtboファイルが/bootに生成されていることを確認してください。# Install sudo apt update sudo apt install make debhelper dkms sudo apt install ~/c1_driver/tier4-camera-gmsl_*.*.*_arm64.deb # Confirm /boot/tier4-*.dtbo exists ls /boot/*.dtbo
デバイスツリーオーバーレイのコマンドは、L4T バージョンによって異なります。 L4T バージョンを確認するには、
$ cat /etc/nv_tegra_releaseを実行して結果を確認します。たとえば、# R32 (release), REVISION: 5.1...,が返された場合、インストールされている L4T バージョンは「32.5.1」です。インストールされている L4T バージョンに応じた手順を選択してください。また、各ポートにカメラを割り当てるには、カメラ ドライバーの README ページ を参照してください。実現したいカメラの割当に応じて適切なオーバーレイ コマンドを指定して下さい。
# For L4T 32.5.1 sudo /opt/nvidia/jetson-io/config-by-hardware.py -n "TIERIV ISX021 GMSL2 Camera Device Tree Overlay" # Confirm /boot/kernel_tegra194-rqx-58g-tier4-isx021-gmsl2-camera-device-tree-overlay-roscube-r32_x.dtb has been generated ls /boot/kernel_tegra194-rqx-58g-tier4-isx021-gmsl2-camera-device-tree-overlay*.dtb # Then, shutdown the system sudo shutdown -h now
# For L4T 32.6.1 sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 2="TIERIV ISX021 GMSL2 Camera Device Tree Overlay" # Confirm /boot/kernel_tegra194-rqx-58g-user-custom.dtb has been generated ls /boot/kernel_tegra194-rqx-58g-user-custom.dtb # Then, shutdown the system sudo shutdown -h now
# For L4T 35.4.1 sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 1="TIERIV ISX021 GMSL2 Camera Device Tree Overlay" # Confirm /boot/kernel_tegra194-p2888-0001-rqx580-nosuspend-user-custom.dtb has been generated ls /boot/kernel_tegra194-p2888-0001-rqx580-nosuspend-user-custom.dtb # Then, shutdown the system sudo shutdown -h now
/opt/nvidia/jetson-io/config-by-hardware.py -l を実行すると、利用可能なオーバーレイ オプションを確認することができます。
$ sudo /opt/nvidia/jetson-io/config-by-hardware.py -l
[sudo] password for ros:
Header 1 [default]: Jetson 40pin Header
No hardware configurations found!
Header 2: Jetson AGX Xavier CSI Connector
Available hardware modules:
1. TIERIV IMX490 GMSL2 Camera Device Tree Overlay
2. TIERIV IMX728 GMSL2 Camera Device Tree Overlay
3. TIERIV ISX021 GMSL2 Camera Device Tree Overlay
4. TIERIV ISX021 IMX490 GMSL2 Camera Device Tree Overlay
5. TIERIV ISX021 IMX490 IMX728 GMSL2 Camera Device Tree Overlay
たとえば、すべての GMSL ポートを C2 カメラに割り当てるには、overlay コマンドは次のようにして下さい。
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 2="TIERIV IMX490 GMSL2 Camera Device Tree Overlay"
C1 と C2 の両方に GMSL ポートを割り当てるには、overlay コマンドを次のようにして下さい。
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 2="TIERIV ISX021 IMX490 GMSL2 Camera Device Tree Overlay"
この場合、ポート 1、2、5、および 6 は C1 に割り当てられ、ポート 3、4、7、および 8 は C2 に割り当てられます。
C1, C2 および C3 カメラに GMSL ポートを割り当てるには、overlay コマンドを次のようにして下さい。
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 2="TIERIV ISX021 IMX490 IMX728 GMSL2 Camera Device Tree Overlay"
デバイスオーバーレイの詳細については、デバイスドライバの GitHub リポジトリを参照してください。
1.1.2.4. ROSCube-X がカメラを認識しているかの確認#
ターミナルウィンドウを開き、次のコマンドを入力します。 /dev/videoX が返された場合、カメラはビデオ デバイスとして正しく認識されています。
ls /dev/video*
/dev/video0
/dev/video1
.
.
.
/dev/video7 # When 8 cameras are connected
1.1.3. GStreamer を使用したカメラ出力の視覚化#
ターミナルウィンドウを開き、次のコマンドを入力します。 Gstreamerが起動し、新しいウィンドウにカメラ画像ストリームが表示されます(図4、図5)
1.1.3.1. ケース 1: 1 台の C1 カメラが接続されている場合#
# If cameras are running in slave mode, execute this i2cset command first
i2cset -f -y 2 0x66 0x04 0xff
# Start streaming
gst-launch-1.0 v4l2src io-mode=0 device=/dev/video0 do-timestamp=true ! 'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! videoscale ! xvimagesink sync=false
1.1.3.2. ケース 2: 8 台の C1 カメラが接続されている場合#
# If cameras are running in slave mode, execute this i2cset command first
i2cset -f -y 2 0x66 0x04 0xff
# Start streaming
gst-launch-1.0 v4l2src io-mode=0 device=/dev/video0 do-timestamp=true ! \
'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! \
xvimagesink sync=false v4l2src io-mode=0 device=/dev/video1 do-timestamp=true ! \
'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! xvimagesink sync=false \
v4l2src io-mode=0 device=/dev/video2 do-timestamp=true ! \
'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! xvimagesink sync=false \
v4l2src io-mode=0 device=/dev/video3 do-timestamp=true ! \
'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! xvimagesink sync=false \
v4l2src io-mode=0 device=/dev/video4 do-timestamp=true ! \
'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! xvimagesink sync=false \
v4l2src io-mode=0 device=/dev/video5 do-timestamp=true ! \
'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! xvimagesink sync=false \
v4l2src io-mode=0 device=/dev/video6 do-timestamp=true ! \
'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! xvimagesink sync=false \
v4l2src io-mode=0 device=/dev/video7 do-timestamp=true ! \
'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! xvimagesink sync=false \
参考
複数カメラを接続し、上記のコマンドでカメラを起動してカメラの起動が不安定な場合、こちらのページを参照ください。
1.1.3.3. ケース 3: C2 カメラ 1 台が接続されている場合#
gst-launch-1.0 v4l2src io-mode=0 device=/dev/video0 do-timestamp=true ! 'video/x-raw, width=2880, height=1860, framerate=30/1, format=UYVY' ! videoscale ! xvimagesink sync=false
1.1.3.4. ケース 4: C3 カメラ 1 台が接続されている場合#
gst-launch-1.0 v4l2src io-mode=0 device=/dev/video0 do-timestamp=true ! 'video/x-raw, width=3840, height=2160, framerate=20/1, format=UYVY' ! videoscale ! xvimagesink sync=false
C2 / C3カメラに関する制限事項
現在、2 台の C2 または C3 カメラを 1 つのデシリアライザ ボードに接続することはできません。
例:
ポート1および2 ... NG
ポート 3 と 4 ... NG
ポート1とポート3 ... OK
ポート 1 と 5 ... OK

図 1.4 カメラ出力画像#
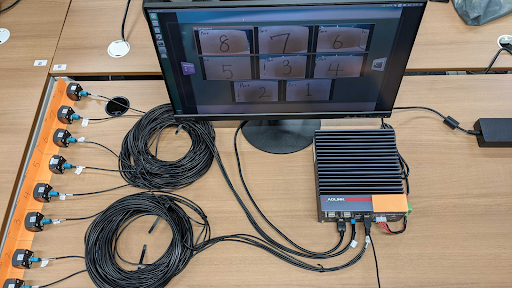
図 1.5 カメラ出力画像 (x8 カメラ)#
1.1.4. 動作モード設定変更#
ドライバの設定を変更するには、設定ファイル /etc/modprobe.d/tier4-*.conf を編集します。 (次のセクションを参照してください)。設定ファイルにはデフォルトで次の行が含まれています。 (C1の場合です)
options tier4_isx021 trigger_mode=0 enable_auto_exposure=1 enable_distortion_correction=1
設定を適用するには、編集後に ROSCube-X を再起動します。
1.1.4.1. 駆動モードの切り替え#
注意
カメラをスレーブモードで動作させるには、ROSCube-Xからフレーム同期信号を入力する必要があります。カメラをスレーブ モードで駆動するには、Shutter triggering over GMSL2 をチェックしてください。
1.1.4.1.1. C1の場合#
設定ファイルを編集することで、カメラの駆動モードをマスター モードからスレーブ モード (またはその逆) に切り替えることができます。
マスターモード: 30fpsのフリーランモード(デフォルト)
スレーブモード: シャッタートリガーモード。シャッタータイミング、フレームレートは FSYNC 信号周波数によって調整可能 (ROSCube-X で設定可能)
モードを切り替えるには、/etc/modprobe.d/tier4-isx021.confのtrigger_modeを編集します。 (以下参照)
駆動モード |
フレームレート |
trigger_mode= |
マスター |
30fps |
0 |
スレーブ |
FSYNC入力周波数に依存 |
1 |
1.1.4.1.2. C2の場合#
C2の場合、/etc/modprobe.d/tier4-imx490.confを編集することで以下のモードを選択することができます。次の表に、使用可能な設定を示します。
The following table shows the available settings.
駆動モード |
フレームレート |
trigger_mode= |
マスター |
10fps |
0 |
スレーブ |
10fps |
1 |
マスター |
20fps |
2 |
スレーブ |
20fps |
3 |
マスター |
30fps |
4 |
スレーブ |
30fps |
5 |
1.1.4.2. レンズ歪み補正 (LDC) の有効化/無効化#
注釈
この設定は C1, C2 および C3 に共通です。
LDC を有効にするには、フラグ enable_distortion_correction=1 (デフォルト) を設定します。 LDC を無効にするには、フラグ enable_distortion_correction=0 を設定します。
1.1.4.3. オートエクスポージャーの有効化/無効化#
注釈
この設定は C1, C2 および C3 に共通です。
LDC を有効にするには、フラグ enable_distortion_correction=1 (デフォルト) を設定します。 LDC を無効にするには、フラグ enable_distortion_correction=0 を設定します。
1.1.4.4. 露光時間の固定#
1.1.4.4.1. C1の場合#
C1には3種類の露光時間があり、変数 shutter_time_min, shutter_time_mid, shutter_time_max を使用することで各々を設定することが可能です。実際の露光時間は、周囲の明るさに応じてこれら3つの3変数値及びそれらの線形補間値の間を遷移します。各変数値の単位はマイクロ秒です。異なる環境光条件下であっても露光時間が変化しないように固定するには、これらの変数に対してすべて同じ値を設定してください。例えば、 /etc/modprobe.d/tier4-isx021.conf に対して以下の設定を記述することで露光時間を11 msに固定することができます。
shutter_time_min=11000 shutter_time_mid=11000 shutter_time_max=11000
1.1.4.4.2. C2の場合#
C1と同様に、C2では shutter_time_min 及び shutter_time_max の2種類の露光時間を設定することが可能です。各変数値の単位はマイクロ秒です。例えば、 /etc/modprobe.d/tier4-imx490.conf に対して以下の設定を記述することで、露光時間を11 msに固定することができます。
shutter_time_min=11000 shutter_time_max=11000
1.1.5. GMSL2 経由のシャッタートリガー#
スレーブ モードでのカメラ操作には、GMSL2 を介したトリガー信号入力 (FSYNC 入力) が必要です。 FSYNC パラメータと GPIO 設定の構成方法については、ADLINK のドキュメント を参照してください。
1.1.5.1. スレーブモードでカメラを駆動するための準備#
ターミナルでi2cget -f -y 2 0x66 0x01を実行して ROSCube-X の HW バージョンを確認し、以下の手順に従ってください。
ストリーミングを開始する前に i2cset -f -y 2 0x66 0x04 0xff を実行してください。システムでは、起動後にこの準備が 1 回だけ必要になります。
準備は必要ありません。
1.1.5.2. C1のFSYNC周波数#
30fpsより低い任意の周波数を入力可能です
1.1.5.3. C2のFSYNC周波数#
C2 の場合、入力可能なFYNCの周波数は駆動モードに依存します。以下の表を参照して下さい。
30fps モード (
trigger_mode=5): 15 < f <= 30 fps20fps モード (
trigger_mode=3): 10 < f <= 20 fps10fps モード (
trigger_mode=1): 5 < f <= 10 fps
1.1.5.4. フレームレートの確認#
ビデオ上で フレームレート設定を確認するには、次のコマンドを実行してください。
カメラがポート 1 にのみ接続されてる場合
gst-launch-1.0 v4l2src io-mode=0 device=/dev/video0 do-timestamp=true ! 'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! fpsdisplaysink video-sink=xvimagesink sync=false
カメラがポート 1 と 2 に接続されている場合
gst-launch-1.0 v4l2src io-mode=0 device=/dev/video0 do-timestamp=true ! 'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! xvimagesink sync=false v4l2src io-mode=0 device=/dev/video1 do-timestamp=true ! 'video/x-raw, width=1920, height=1280, framerate=30/1, format=UYVY' ! fpsdisplaysink video-sink=xvimagesink sync=false