概要#
Driving Log Replayer は、log(rosbag2)を用いて Autoware の open loop simulation を実行し、Autoware が出力するトピックを評価するパッケージです。 Sensing, Localization, Perception の性能確認と、ソフトウェアのリグレッションテストに使用します。
関連ドキュメント#
関連リポジトリ#
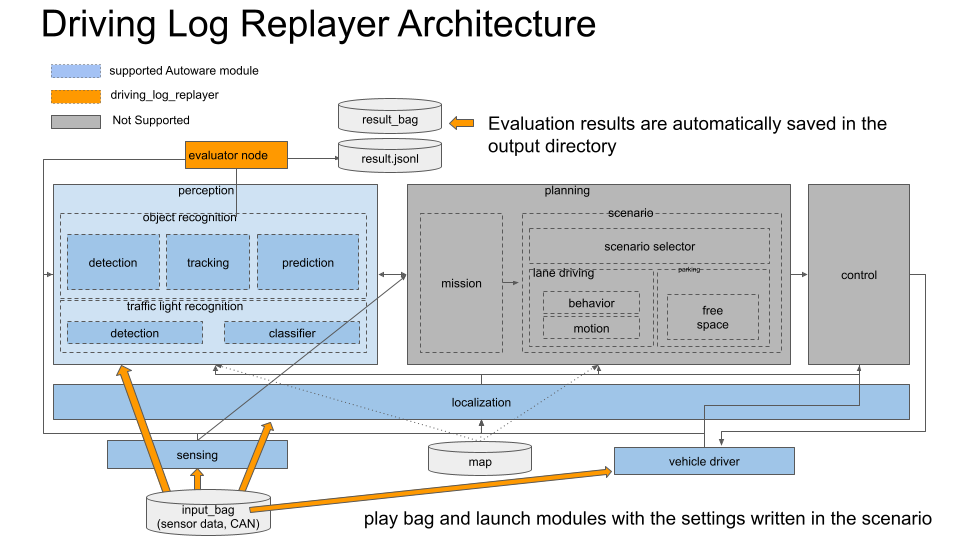
アーキテクチャ#
Driving Log Replayer は、Autoware の評価ノードを Autoware の標準機能に付加した構成となっている。 アーキテクチャ図を以下に示す。
パッケージ構成#
Driving Log Replayer の評価ノードは、以下のように動作します。
- 評価の条件が記載されたシナリオをパッケージが読み取る
- autoware を起動する
- 評価結果を jsonl ファイル形式で出力する
ノードの動作の詳細を下図に示す。

利用フロー#
- 評価用の rosbag を実車で取得する
- 取得した rosbag を必要な時間、topic だけ残るようにフィルタする
- フィルタ処理には TIER IV で開発した ros2bag_extensions を使用する
- フィルタでどのtopicを残すかは、docs/use_case/のドキュメント参照
- シナリオを作成する
- sample folder 内にシナリオの例あり
- 記述内容はフォーマット定義を参照
- ユースケースが obstacle_segmentation, perception, perception_2d, traffic_light の場合、t4_dataset への変換に対応したアノテーションツールでアノテーションを実施する。
- Deepen.AIが利用可能
- perception_datasetに変換機能を追加すれば他のアノテーションツールも使用可能になる
- 評価を実行する。