Overview#
Driving Log Replayer is a package that runs Autoware in an open loop by supplying previously recorded input data using log(rosbag2) API. The package gathers information and evaluates topics output produced by Autoware. Its use is to test the software regression and check Autoware's performance of sensing, localization, and perception components.
Related Documents#
Related repositories#
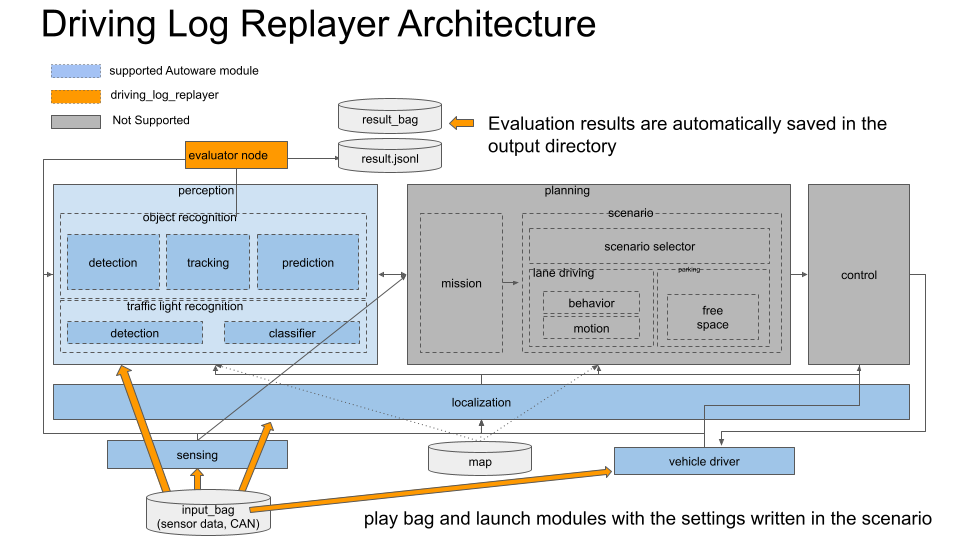
Architecture#
Driving Log Replayer package contains an evaluation node that extends Autoware's standard functionality. The architecture graph is shown below.
Package structure#
The evaluation node works in the following manner:
- reads a scenario describing the conditions of positive evaluation
- launches autoware
- outputs the evaluation result in a JSON file format
The details of the node's operation are shown in the figure below.

Example usage flow#
- Acquire rosbags for evaluation using a real-world vehicle.
- Filter the acquired rosbags to contain only sufficient input topics in required period of time
- For this purpose please use ros2bag_extensions package (developed by TIER IV). To properly filter the input rosbag:
- See docs/use_case/ documentations for which topics to leave in the filter.
- For this purpose please use ros2bag_extensions package (developed by TIER IV). To properly filter the input rosbag:
- Create an evaluation scenario
- Example scenarios could be found in the repository's sample folder
- Refer to the format definition section of this document for description contents.
- If the node should test obstacle_segmentation, perception, perception_2d, or traffic_light stacks, please annotate with an annotation tool that supports conversion to t4_dataset.
- Deepen.AI is available.
- By adding conversion functionality to perception_dataset, it becomes possible to use other annotation tools as well.
- Perform the evaluation.