点群生成の評価#
Autoware の点群処理のプロセス(sensing→perception)が動作して、/perception/obstacle_segmentation/pointcloud が意図通りに出力されるかどうかを評価する。
点群が意図通りに出力されているかの判定は、t4_dataset と点群を用いて行う。以下の評価を同時に行う。
- 事前にアノテーションしておいた車両や歩行者などが検知出来ているかの評価(detection: 検知)
- レーンとシナリオで定義した自車両周りのポリゴンが重なるエリアに余分な点群が出ていないかの評価(non_detection: 非検知)
また、評価条件に null を指定すれば評価しないことも可能である。すなわち以下の 3 モードで評価を実施できる。
- detection と non_detection を同時に評価する
- detection だけ評価する(NonDetection: null)
- non_detection だけ評価する(Detection: null)
アノテーションツールはDeepenが推奨であるが、t4_dataset への変換がサポートされているツールであればよい。 変換ツールさえ作成できれば複数のアノテーションツールを利用することが可能である。
評価方法#
obstacle_segmentation.launch.py を使用して評価する。
launch を立ち上げると以下のことが実行され、評価される。
- launch で評価ノード(
obstacle_segmentation_evaluator_node)とlogging_simulator.launch、ros2 bag playコマンドを立ち上げる - bag から出力されたセンサーデータを autoware が受け取って、/perception/obstacle_segmentation/pointcloud を出力する
- 評価ノードが/perception/obstacle_segmentation/pointcloud を subscribe して、header の時刻で非検知エリアの polygon を計算する。
- 評価ノードが点群と非検知エリアのpolygonをperception_eval に渡して評価する。結果をファイルに記録する
- bag の再生が終了すると自動で launch が終了して評価が終了する
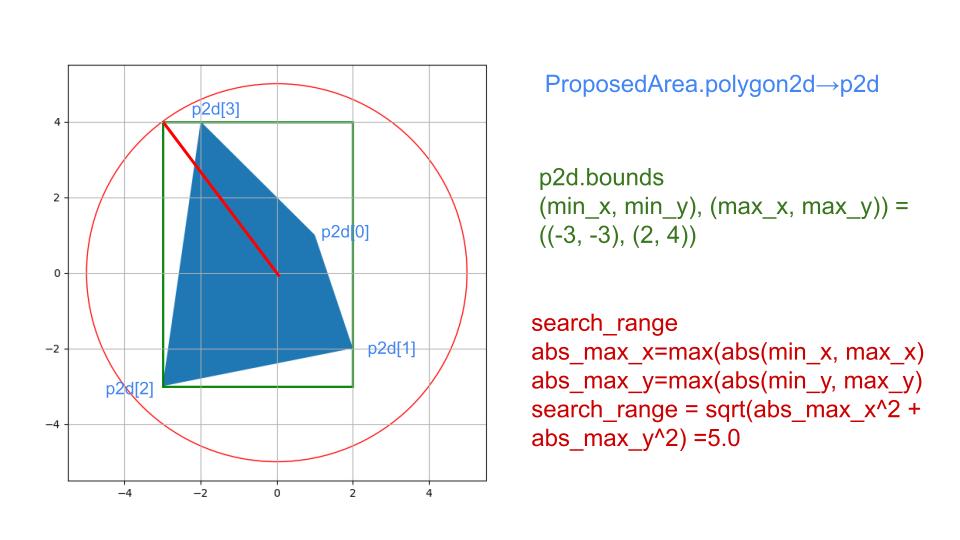
非検知エリアのpolygonの計算方法#
非検知エリアは、シナリオで与えられたpolygonと、走行路(road_lanelet)の重なり合ったエリアとして算出される。 以下のステップに従って計算される。
- pointcloudのheader.stampの時刻でのmap_to_base_linkのtransformを取得して、polygonをmap座標系に変換する
- 車両のいるpointから、search_range(下図参照)の範囲のroad_laneletを取得する
- 2で取得したroad_laneletとpolygonのintersectionを取る
- 3で取得したpolygonの配列をbase_link座標系へ戻す(pointcloudをフィルタするために座標系を一致させる)
ステップ2で、polygonが存在し得る範囲のlaneletに絞ることで、ステップ3で空のpolygonが返ってくるとわかりきっているlaneletとのintersection処理を省いている。
評価結果#
topic の subscribe 1 回につき、以下に記述する判定結果が出力される。
検知正常#
以下の条件をすべて満たす場合、検知正常となる。
- シナリオで指定した UUID を持バウンディングボックス内に、指定した点数以上の点群(/perception/obstacle_segmentation/pointcloud)が含まれていること。
- 複数の UUID を指定した場合は、指定したすべてのバウンディングボックスについて条件を満たす必要があります。
- Autoware の診断機能で提供される点群の出力レートがエラー状態でない。デフォルトのしきい値は 1.0Hz です。
検知警告#
シナリオで指定した UUID を持つ bounding box の visibility が none(occlusion 状態)であり、評価出来ない場合。
検知異常#
検知警告でも、検知正常でもない場合
非検知正常#
非検知エリアに点群が 1 点もないこと。
非検知エリアは評価方法のステップ 3 で計算される領域。
非検知異常#
非検知エリアに点群が出ていること。
評価ノードが使用する Topic 名とデータ型#
Subscribed topics:
| topic 名 | データ型 |
|---|---|
| /perception/obstacle_segmentation/pointcloud | sensor_msgs::msg::PointCloud2 |
| /diagnostics | diagnostic_msgs::msg::DiagnosticArray |
| /tf | tf2_msgs/msg/TFMessage |
| /planning/scenario_planning/status/stop_reasons | tier4_planning_msgs::msg::StopReasonArray |
| /planning/scenario_planning/trajectory | autoware_planning_msgs::msg::Trajectory |
Published topics:
| topic 名 | データ型 |
|---|---|
| /driving_log_replayer/marker/detection | visualization_msgs::msg::MarkerArray |
| /driving_log_replayer/marker/non_detection | visualization_msgs::msg::MarkerArray |
| /driving_log_replayer/pcd/detection | sensor_msgs::msg::PointCloud2 |
| /driving_log_replayer/pcd/non_detection | sensor_msgs::msg::PointCloud2 |
| /planning/mission_planning/goal | geometry_msgs::msg::PoseStamped |
logging_simulator.launch に渡す引数#
autoware の処理を軽くするため、評価に関係のないモジュールは launch の引数に false を渡すことで無効化する。以下を設定する。
- localization: false
- control: false
simulation#
シミュレーション実行に必要な情報を述べる。
入力 rosbag に含まれるべき topic#
t4_dataset で必要なトピックが含まれていること
車両の ECU の CAN と、使用している sensor の topic が必要 以下は例であり、違うセンサーを使っている場合は適宜読み替える。
LiDAR が複数ついている場合は、搭載されているすべての LiDAR の packets を含める。
| topic 名 | データ型 |
|---|---|
| /pacmod/from_can_bus | can_msgs/msg/Frame |
| /localization/kinematic_state | Type: nav_msgs/msg/Odometry |
| /sensing/gnss/ublox/fix_velocity | geometry_msgs/msg/TwistWithCovarianceStamped |
| /sensing/gnss/ublox/nav_sat_fix | sensor_msgs/msg/NavSatFix |
| /sensing/gnss/ublox/navpvt | ublox_msgs/msg/NavPVT |
| /sensing/imu/tamagawa/imu_raw | sensor_msgs/msg/Imu |
| /sensing/lidar/*/velodyne_packets | velodyne_msgs/VelodyneScan |
| /tf | tf2_msgs/msg/TFMessage |
CAN の代わりに vehicle の topic を含めても良い。
| topic 名 | データ型 |
|---|---|
| /localization/kinematic_state | Type: nav_msgs/msg/Odometry |
| /sensing/gnss/ublox/fix_velocity | geometry_msgs/msg/TwistWithCovarianceStamped |
| /sensing/gnss/ublox/nav_sat_fix | sensor_msgs/msg/NavSatFix |
| /sensing/gnss/ublox/navpvt | ublox_msgs/msg/NavPVT |
| /sensing/imu/tamagawa/imu_raw | sensor_msgs/msg/Imu |
| /sensing/lidar/*/velodyne_packets | velodyne_msgs/VelodyneScan |
| /tf | tf2_msgs/msg/TFMessage |
| /vehicle/status/control_mode | autoware_vehicle_msgs/msg/ControlModeReport |
| /vehicle/status/gear_status | autoware_vehicle_msgs/msg/GearReport |
| /vehicle/status/steering_status | autoware_vehicle_msgs/SteeringReport |
| /vehicle/status/turn_indicators_status | autoware_vehicle_msgs/msg/TurnIndicatorsReport |
| /vehicle/status/velocity_status | autoware_vehicle_msgs/msg/VelocityReport |
入力 rosbag に含まれてはいけない topic#
| topic 名 | データ型 |
|---|---|
| /clock | rosgraph_msgs/msg/Clock |
clock は、ros2 bag play の--clock オプションによって出力しているので、bag 自体に記録されていると 2 重に出力されてしまうので bag には含めない
evaluation#
評価に必要な情報を述べる。
シナリオフォーマット#
サンプル参照
評価結果フォーマット#
サンプル参照
obstacle_segmentation では、検知(Detection)と非検知(NonDetection)の 2 つを評価している。 1 回の点群の callback で同時に評価しているが、それぞれ別にカウントしている。 Result は検知と非検知両方のパスしていれば true でそれ以外は false 失敗となる。
以下に、フォーマットを示す。 注:結果ファイルフォーマットで解説済みの共通部分については省略する。
{
"Frame": {
"FrameName": "評価に使用したt4_datasetのフレーム番号",
"FrameSkip": "objectの評価を依頼したがdatasetに75msec以内の真値がなく評価を飛ばされた回数",
"StopReasons": "Planning moduleが出力する停止理由。参考値",
"TopicRate": "点群の出力レートが正常かどうかを示すdiagの結果",
"Detection": {
"Result": { "Total": "Success or Fail", "Frame": "Success, Fail, Warn or Invalid" },
"Info": {
"DetectionSuccess or DetectionFail or DetectionWarn": {
"Annotation": {
"Scale": {
"x": "バウンディングボックスのx方向の長さ",
"y": "バウンディングボックスのy方向の長さ",
"z": "バウンディングボックスのz方向の長さ"
},
"Position": {
"position": {
"x": "バウンディングボックスの位置x",
"y": "バウンディングボックスの位置y",
"z": "バウンディングボックスの位置z"
},
"orientation": {
"x": "バウンディングボックスの向きx",
"y": "バウンディングボックスの向きy",
"z": "バウンディングボックスの向きz",
"w": "バウンディングボックスの向きw"
}
},
"UUID": "バウンディングボックスのUUID",
"StampFloat": "バウンディングボックスのunix_time[us]のfloatにしたもの"
},
"PointCloud": {
"NumPoints": "バウンディングボックス内に含まれる点群の数",
"Nearest": "バウンディングボックス内でbase_linkから最も近い点の[x,y,z]座標",
"Stamp": {
"sec": "使用した点群のheader.stampのsec",
"nanosec": "使用した点群のheader.stampのnanosec"
}
}
}
}
},
"NonDetection": {
"Result": "Success, Fail, or Invalid",
"Info": {
"PointCloud": {
"NumPoints": "非検知エリアに出ている点群の数",
"Distance": {
"0-1": "base_linkから0-1mの間の非検知エリアに出ている点群数",
"x-x+1": "非検知エリアに出ている点群の距離毎の分布",
"99-100": "base_linkから99-100mの間の非検知エリアに出ている点群数"
}
}
}
}
}
}