1.3. Installation Guide for ADLINK RQX-59G#
Note
This document is for users of the ADLINK RQX-59G.
Note
This document is based on tier4_automotive_hdr_camera version 2.2.0.
1.3.1. Required Items#
1.3.1.1. Hardware Requirements#
FAKRA coaxial cables (FAKRA to mini FAKRA, 1:4)
TIER IV Automotive HDR Camera (C1, C2, C3, C1-MP, or C2-MP)
1.3.1.2. Software Requirements#
Software |
Version |
Download Link |
|---|---|---|
RQX-59G BSP (JetPack) |
r36.4 (6.1) |
BSP on the RQX-59G Product Page |
tier4-gmsl-camera |
2.2.0 |
1.3.2. Flashing the OS (BSP)#
Attention
Please note that the BSP flashing process is outside our standard support scope. For any inquiries, troubleshooting, or issues related to OS installation, please contact your hardware distributor or ADLINK support directly.
Please refer to the Manual on the RQX-59G Product Page for instructions on flashing the BSP to your device.
1.3.3. Hardware Connection#
Ensure that the RQX-59G is powered off.
Connect the cameras to the FAKRA connectors of the cable (single FAKRA connector side). Then insert the mini FAKRA connectors of the cable into the RQX-59G’s GMSL2 ports.
Ensure that the lock tabs on the FAKRA connectors are properly seated.

Fig. 1.7 RosCube RQX-59G#
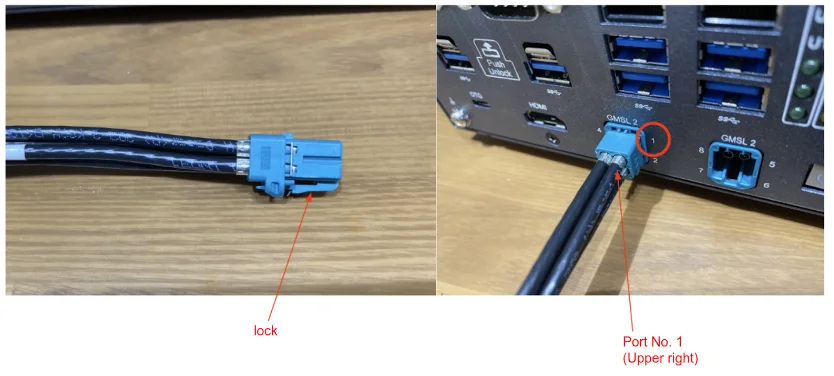
Fig. 1.8 Connector#
Restriction regarding C2 and C3 camera
Currently, two C2 / C3 cameras cannot be connected to single deserializer board.
For example:
Port 1 and 2 … NG
Port 3 and 4 … NG
Port 1 and 3 … OK
Port 1 and 5 … OK
1.3.4. Power ON and Login#
Power On
Power on the RQX-59G and confirm that the power-on LED illuminates blue.
Login
Please log in using the username and password configured during the BSP flashing process.
For example, the factory default login password is as follows:
user |
|
password |
|
Note
The factory default BSP version may not match the required version. If this is the case, please proceed to flash the BSP.
1.3.5. Camera Driver Installation#
This process should be performed on the RQX-59G.
Step 1: Download the Driver
Open a terminal on the RQX-59G and run the following command to download the driver package.
wget https://github.com/tier4/tier4_automotive_hdr_camera/releases/download/v2.2.0/tier4-camera-gmsl_2.2.0_arm64.deb
Step 2: Install the Driver
Execute the following command in the directory where the downloaded .deb file is located to install the package.
sudo apt install ./tier4-camera-gmsl_*.deb
Step 3: Configure the Device Tree
Note
For advanced configurations, including how to connect a combination of different camera types, please refer to the camera driver’s GitHub page.
After installing the driver, you need to generate a custom .dtb file to define the assignment of cameras for each GMSL port. Run the command corresponding to your camera type:
C1
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 2="TIERIV GMSL2 Camera Device Tree Overlay: C1x8"
C2
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 2="TIERIV GMSL2 Camera Device Tree Overlay: C2x8"
C3
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 2="TIERIV GMSL2 Camera Device Tree Overlay: C3x8"
C1-MP
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 2="TIERIV GMSL2 Camera Device Tree Overlay: C1MPx8"
C2-MP
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n 2="TIERIV GMSL2 Camera Device Tree Overlay: C2MPx8"
Step 4: Restart the System
To apply the device tree changes, power off the system and turn it back on.
sudo shutdown -h now
(After the RQX-59G has completely shut down, press the power button to restart it.)
1.3.6. Verify Camera Recognition#
Open a terminal and run the following command to verify that the cameras are recognized as V4L2 devices. If the number of video devices matches the number of connected cameras, the camera recognition check is complete.
ls /dev/video*
/dev/video0
/dev/video1
.
.
1.3.7. Reference#
1.3.8. Next Steps#
For image acquisition and detailed settings, please refer to the Camera Operation and Configuration Guide.