Detection#
Use Cases and Requirements#
Prediction in Object Recognition is required for use cases involved with obstacles:
- Changing lane
- Turning at intersection
- Stopping at a crosswalk when pedestrians are walking
- Passing intersection without traffic lights
- Merging into another lane
- Taking over Pedestrian/Cyclists
- Stopping/yielding to an obstacle
For the details about related requirements, please refer to the document for Perception stack.
Role#
Prediction in Object Recognition estimate objects' intention. Intentions are represented as objects' future trajectories with covariance. The Planning module makes a decision and plans a future ego-motion based on the results of predicted objects.
Input#
| Input | Data Type | Topic |
|---|---|---|
| Dynamic Objects | autoware_perception_msgs::DynamicObjectArray |
/perception/object_recognition/tracking/objects |
| Map | autoware_lanelet2_msgs::MapBin |
/map/vector_map |
| TF | tf2_msgs::TFMessage |
/tf |
Output#
| Output | Data Type | Output Component | TF Frame | Topic |
|---|---|---|---|---|
| Dynamic Objects | autoware_perception_msgs::DynamicObjectArray |
Planning | map |
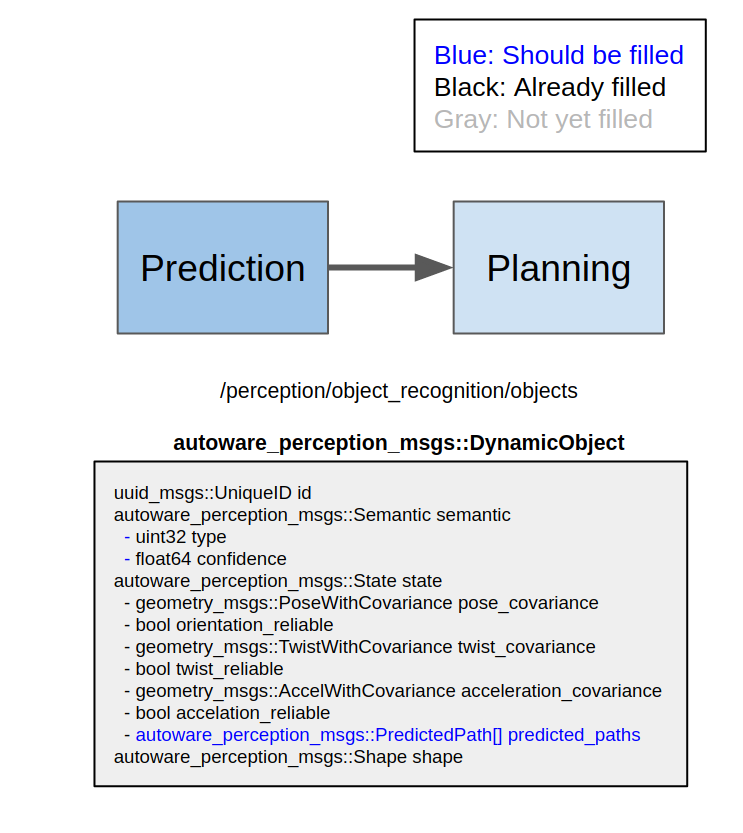
/perception/object_recognition/objects |
Design#
This is our sample implementation for the Tracking module.

Requirement in Output#
Designated objects' property in autoware_perception_msgs::DynamicObject needs to be filled in the Prediction module before passing to the Planning component.
| Property | Definition | Data Type | Parent Data Type |
|---|---|---|---|
| predicted_path | Predicted future paths for an object. | autoware_perception_msgs::PredictedPath[] |
autoware_perception_msgs::State |